在過去的40年中,振動(dòng)控制技術(shù)已經(jīng)歷了四代:獨(dú)立控制器、基于PC的控制技術(shù)、PC聯(lián)機(jī)式和完全網(wǎng)絡(luò)構(gòu)架的控制技術(shù)。Spider-81代表了第四代控制技術(shù)——建立在以太網(wǎng)與IEEE 1588時(shí)間同步的網(wǎng)絡(luò)構(gòu)架控制技術(shù)。相比于前幾代技術(shù),這種技術(shù)提供了更大的靈活性、可靠性、可配置性和可擴(kuò)展性。
由美國晶鉆儀器研發(fā)的Spider-81振動(dòng)控制器它是一個(gè)可擴(kuò)展的模塊化的分布式振動(dòng)控制系統(tǒng),它是第四代振動(dòng)控制系統(tǒng)的代表,可實(shí)現(xiàn)最大512個(gè)輸入通道數(shù)的振動(dòng)控制系統(tǒng)。該系統(tǒng)提供了一系列的振動(dòng)控制功能模塊,包括:隨機(jī)、正弦加隨機(jī)、隨機(jī)加隨機(jī)、正弦加隨機(jī)加隨機(jī)、正弦掃頻、共振搜索與駐留、經(jīng)典沖擊、瞬態(tài)沖擊、沖擊響應(yīng)譜、路譜仿真等。
Spider-81控制測試控制器支持市面上常見的振動(dòng)臺(tái)控制,如國產(chǎn)的包括:蘇試振動(dòng)臺(tái)、東菱振動(dòng)臺(tái)、希爾振動(dòng)臺(tái)、中元振動(dòng)臺(tái),進(jìn)口的振動(dòng)臺(tái)包括:SENTEK、UD、SD、LDS、金頓、Tier等振動(dòng)臺(tái)。下面我們從互聯(lián)網(wǎng)上分享一些對(duì)振動(dòng)臺(tái)使用的常用的技術(shù)公式。
1、求推力(F)的公式
![]() 式中:
式中:
F — 推力(激振力)(N)
m0 — 振動(dòng)臺(tái)運(yùn)動(dòng)部分有效質(zhì)量(kg)
m1 — 輔助臺(tái)面質(zhì)量(kg)
m2 — 試件(包括夾具、安裝螺釘)質(zhì)量(kg)
A — 試驗(yàn)加速度(m/s2)
2、加速度(A)、速度(V)、位移(D)三個(gè)振動(dòng)參數(shù)的互換運(yùn)算公式
![]()
式中:
A — 試驗(yàn)加速度(m/s2)
V — 試驗(yàn)速度(m/s)
ω — 角速度,ω=2πf
f — 試驗(yàn)頻率(Hz)
![]()
式中:
V — 試驗(yàn)速度(m/s)
D — 位移(mm,0-P)單峰值
ω — 角速度,ω=2πf
f — 試驗(yàn)頻率(Hz)
![]()
式中:
A — 試驗(yàn)加速度(m/s2)
D — 位移(mm,0-P)單峰值
ω — 角速度,ω=2πf
f — 試驗(yàn)頻率(Hz)
上式亦可簡化為:
![]()
式中:
A — 試驗(yàn)加速度(g,1g=9.8m/s2)
D — 位移(mm,0-P)單峰值
f — 試驗(yàn)頻率(Hz)
上式也可以改寫為:
![]()
A — 試驗(yàn)加速度(m/s2)
D — 位移(mm,0-P)單峰值
f — 試驗(yàn)頻率(Hz)
3、定振級(jí)掃頻試驗(yàn)平滑交越點(diǎn)頻率的計(jì)算公式
(1) 加速度與速度平滑交越點(diǎn)頻率的計(jì)算公式
![]() 式中:
式中:
fA-V — 加速度與速度平滑交越點(diǎn)頻率(Hz)
A — 試驗(yàn)加速度(m/s2)
V — 試驗(yàn)速度(m/s)
(2) 速度與位移平滑交越點(diǎn)頻率的計(jì)算公式
![]()
式中:
VD-f — 加速度與速度平滑交越點(diǎn)頻率(Hz)
V — 試驗(yàn)速度(m/s)
D — 位移(mm,0-P)單峰值
(3) 加速度與位移平滑交越點(diǎn)頻率的計(jì)算公式
式中:
fA-D — 加速度與位移平滑交越點(diǎn)頻率(Hz)
A — 試驗(yàn)加速度(m/s2)
D — 位移(mm,0-P)單峰值
上式可以簡化為:
![]()
4、掃描時(shí)間和掃描速率的計(jì)算公式
(1) 線性掃描比較簡單:
![]()
式中:
S1 — 掃描時(shí)間(s或min)
fH-fL — 掃描寬帶,其中fH為上限頻率,fL為下限頻率(Hz)
V1 — 掃描速率(Hz/min 或Hz/s)
(2) 對(duì)數(shù)掃頻
倍頻程的計(jì)算公式:
![]()
式中:
n — 倍頻程(oct)
fH — 上限頻率(Hz)
fL — 下限頻率(Hz)
掃描速率計(jì)算公式:
式中:
R — 掃描速率(oct/min或s)
fH — 上限頻率(Hz)
fL — 下限頻率(Hz)
T — 掃描時(shí)間(min或s)
掃描時(shí)間計(jì)算公式:
![]()
式中:
T — 掃描時(shí)間(min或s)
n — 倍頻程(oct)
R — 掃描速率(oct/min 或oct/s)
5、隨機(jī)振動(dòng)試驗(yàn)常用的計(jì)算公式
(1) 頻率分辨力計(jì)算公式:
![]()
式中:
△f — 頻率分辨力(Hz)
fmax — 最高控制頻率(Hz)
N — 譜線數(shù)(線數(shù))
fmax是△f的整倍數(shù)
(2) 隨機(jī)振動(dòng)加速度總均方根值的計(jì)算
A、利用升譜和降譜以及平直譜計(jì)算公式
功率譜密度曲線圖(a)
平直譜計(jì)算公式:
![]()
升譜計(jì)算公式:
降譜計(jì)算公式:
式中:m=N/3,N為譜線的斜率(dB/octive)。
若N=3,則m=1時(shí),必須采用以下降譜計(jì)算公式:
加速度總均方根值:
![]()
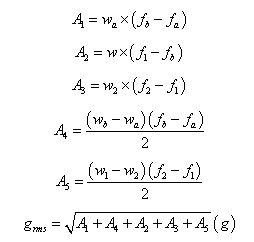
B、利用平直譜計(jì)算公式:計(jì)算加速度總均方根值
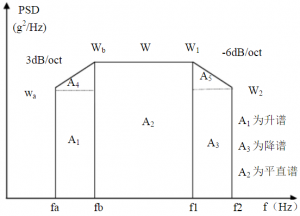
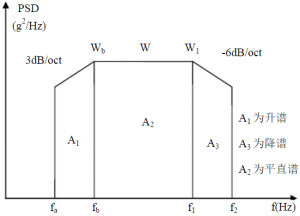
功率譜密度曲線圖(b)
為了簡便起見,往往將功率譜密度曲線圖劃分成若干矩形和三角形,并利用上升斜率(如3dB/oct)和下降斜率(如-6dB/oct)分別算出wa和w2,然后求各個(gè)幾何形狀的面積與面積和,再開方求出加速度總均方根值:
注意:第二種計(jì)算方法的結(jié)果往往比用升降譜計(jì)算結(jié)果要大,作為大概估算可用,但要精確計(jì)算就不能用。
(3) 已知加速度總均方根g(rms)值,求加速度功率譜密度公式
![]()
(4) 求Xp-p最大的峰峰位移(mm)計(jì)算公式
準(zhǔn)確的方法應(yīng)該找出位移譜密度曲線,計(jì)算出均方根位移值,再將均方根位移乘以三倍得出最大峰值位移(如果位移譜密度是曲線,則必須積分才能計(jì)算)。在工程上往往只要估計(jì)一個(gè)大概的值。這里介紹一個(gè)簡單的估算公式
式中:
Xp-p — 最大的峰峰位移(mm,p-p)
fo — 為下限頻率(Hz)
wo — 為下限頻率(fo)處的PSD值(g2/Hz)
(5) 求加速度功率譜密度斜率(dB/oct)公式
式中:n為oct倍頻程
![]()
wH — 頻率fH處的加速度功率譜密度值(g2/Hz)
wL — 頻率fL處的加速度功率譜密度值(g2/Hz)
以上內(nèi)容來自互聯(lián)網(wǎng),由銳達(dá)再次整理,如果存在侵權(quán)問題,請(qǐng)聯(lián)系管理員下架。