隨機測試
在隨機振動測試中,由一寬帶隨機信號驅動振動臺,通過回路信號調整該驅動信號,以產生一個與測試目標譜相符合的響應。這種控制算法可以計算輸出驅動和輸入控制通道之間的逆傳遞函數,是放大器、振動臺和動圈之間的綜合結果。產品的逆傳遞函數和響應譜可以產生一個輸出驅動譜,然后相位隨機發生器和逆FFT產生一個隨機來驅動輸出時間流。

隨機控制過程
隨機激勵常常被用來模擬真實世界的振動。隨機振動控制系統的目的是產生一個真正的隨機驅動信號, 當經由放大器/振蕩器施加到設備,將所得振動器輸出頻譜信號匹配用戶指定的測試目標譜。此參考譜在(加速度)2每赫茲的單位頻域中定義的。這個信號將被施加到試件上以驗證該設備的在其服務的環境中發揮作用的能力。
如果被控制的一系列的組件(即,放大器,振蕩器和測試結構)被假定為一個集成的線性系統,那么它可以通過在頻域中一個系統傳遞函數H(f)進行說明。該控制和驅動信號的頻率譜,Y(f)和X(f)中,可以通過H(f)聯系在一起:
Y(f) = H(f) X(f)
或
X(f) = H(f) -1 Y(f)
H(f)-1稱為逆傳遞函數
如果平坦頻譜驅動信號激勵一個搖床/測試條系統,得到的加速度響應譜不會是平坦的。電樞共振和試件的動力學上的反應使得所得到的頻譜有峰(共振)和谷(反共振)。
將指定的譜應用到試件上,驅動器的頻譜必須被改變以校正所述搖床/負載組合的動態。這個過程一般稱為“均衡”。逆傳遞函數被連續計算測試過程中監測到的任何變化。進行實時更正。
得到所需的光譜R(f)(參考光譜或者目標譜),驅動所需的值可以計算為:
X(f) = H(f) -1 R(f)
X(f)所需的驅動信號的頻譜。
一旦驅動器X光譜(f)是已知的,有幾種方法可以生成一個隨機的時域輸出信號。這個信號必須有以下屬性:
- 譜形狀通過X(f)定義
- 消除不連續性
- 高斯振幅分布
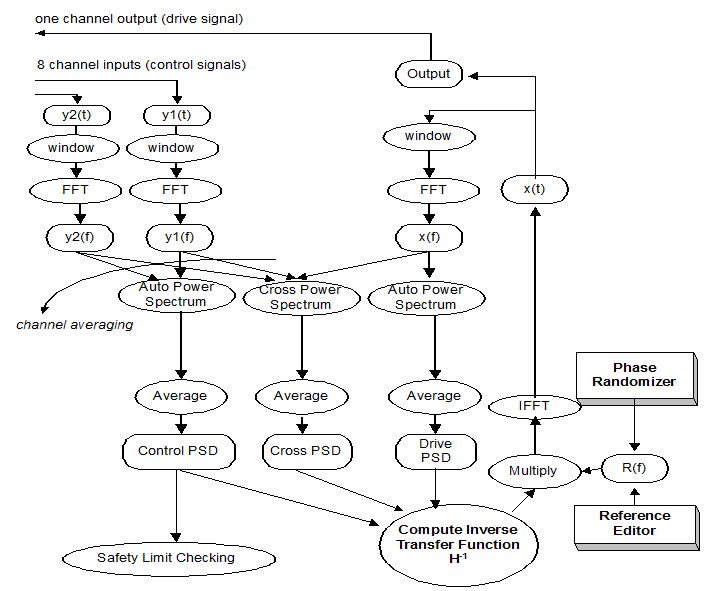
該算法包括以下步驟:
- 數字化輸入信號和使用FFT處理將其轉化為頻域。
- 通過互譜估算經平均輸入和輸出之間的逆向傳遞函數。
- 生成具有隨機相位的參考頻譜。
- 參考譜乘以逆向傳遞函數,然后應用逆FFT將來產生輸出的時間流波形。
- 通過一個D / A轉換器,輸出時間流波形。
所有這些計算在一幀的期間內完成,以確保一個非常快的控制回路的時間。
隨機控制動態范圍
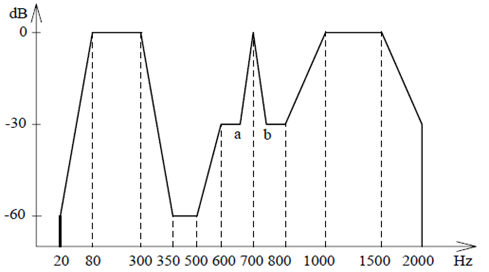
隨機振動控制器(如:Spider-81)的關鍵要求之一是實現高控制動態范圍。控制動態范圍是比較控制信號中最高和最低光譜幅度的一種方法。Spider能達到至少90dB控制動態范圍。這可以通過修改的中國測試標準JJG-948來衡量。JJG-948只要求控制動態范圍到60dB。通過對噪聲下限的修改,可以顯示出更高的控制動態范圍。
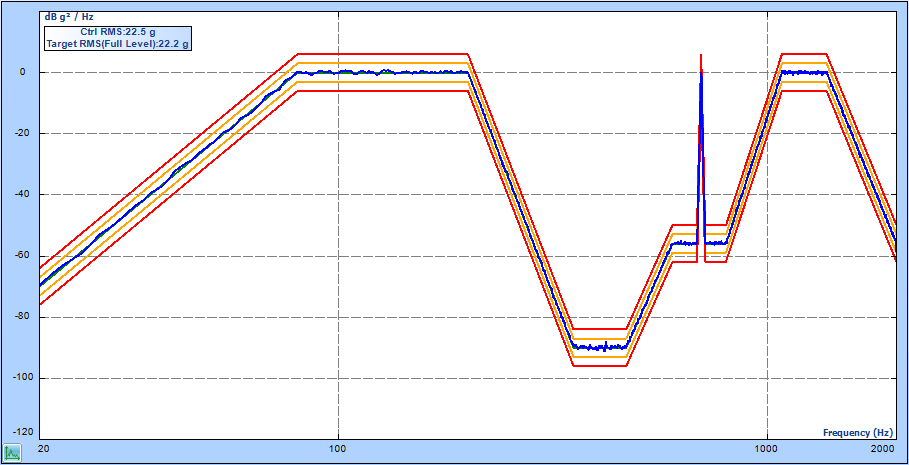
Spider-81 振動控制儀-90dB隨機振動