數(shù)值信號(hào)顯示不能直觀表示被測(cè)結(jié)構(gòu)振動(dòng)強(qiáng)度和分布。結(jié)構(gòu)的變形動(dòng)畫(huà)可以讓用戶清晰直觀地觀察到結(jié)構(gòu)的振動(dòng)強(qiáng)度。它利用彩色圖顏色的深淺圖形化顯示振動(dòng)的大小,幫助用戶找到測(cè)試單元振動(dòng)強(qiáng)度的最大處和最小處。
這需要先構(gòu)建被測(cè)結(jié)構(gòu)的三維幾何模型。然而由于測(cè)試件在x、y、z坐標(biāo)上尺寸和幾何的復(fù)雜性,創(chuàng)建測(cè)試件的三維模型往往具有挑戰(zhàn)性。
晶鉆儀器公司開(kāi)發(fā)的振動(dòng)可視化功能,只需要簡(jiǎn)單的幾個(gè)步驟就可以生成任何復(fù)雜結(jié)構(gòu)的三維幾何模型,而且可以顯示結(jié)構(gòu)的變形動(dòng)畫(huà)。這讓被測(cè)結(jié)構(gòu)在振動(dòng)測(cè)試過(guò)程中的振動(dòng)強(qiáng)度可視化。
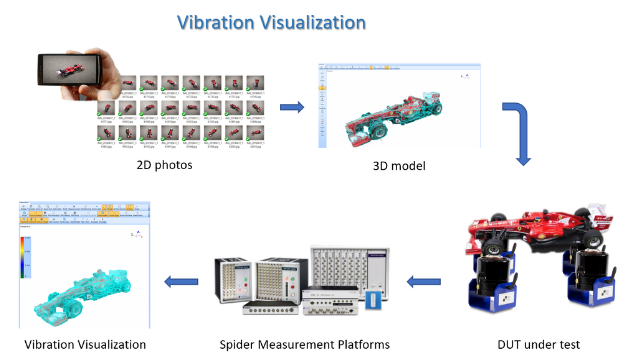
圖1 振動(dòng)可視化過(guò)程概述
如上圖所示,通過(guò)智能手機(jī)拍攝的一系列二維圖片構(gòu)建真實(shí)結(jié)構(gòu)的三維模型。然后對(duì)結(jié)構(gòu)進(jìn)行振動(dòng)測(cè)試,利用三維模型對(duì)振動(dòng)進(jìn)行實(shí)時(shí)可視化。
三維模型的振動(dòng)可視化可以在測(cè)量過(guò)程中實(shí)時(shí)進(jìn)行,也可以在測(cè)量完成后離線進(jìn)行。實(shí)時(shí)動(dòng)畫(huà)通過(guò)輸入通道(傳感器)的數(shù)據(jù)或RMS數(shù)據(jù)來(lái)顯示被測(cè)件在振動(dòng)試驗(yàn)過(guò)程中的變形情況。離線振動(dòng)數(shù)據(jù)可以在時(shí)域和頻域進(jìn)行可視化,時(shí)域動(dòng)畫(huà)顯示各階振型的組合,而頻域動(dòng)畫(huà)則將各階振型解耦并顯示各階振型。
有三種生成被測(cè)結(jié)構(gòu)三維幾何模型的方法。
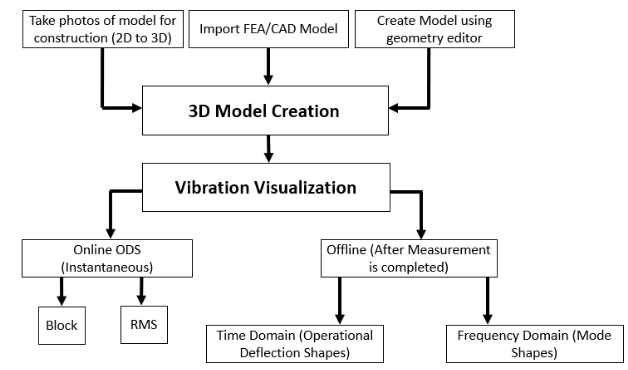
圖2 振動(dòng)可視化過(guò)程的示意圖
晶鉆儀器公司的三維建模軟件采用先進(jìn)的二維到三維重構(gòu)技術(shù),為復(fù)雜測(cè)試結(jié)構(gòu)創(chuàng)建三維幾何模型提供了一個(gè)簡(jiǎn)單的解決方案。這種方法不僅為用戶節(jié)省了大量的時(shí)間和精力,而且提供了一個(gè)非常簡(jiǎn)單的精確模型。用戶只需拍下測(cè)試項(xiàng)目的照片并將其導(dǎo)入軟件,將上傳的圖像進(jìn)行匹配,提取特征,經(jīng)過(guò)點(diǎn)和面重構(gòu)處理,構(gòu)建結(jié)構(gòu)的三維模型。這種方法非常容易使用,不需要任何手工勞動(dòng),比其他兩種方法快得多。
以下步驟簡(jiǎn)要說(shuō)明了二維到三維重構(gòu)技術(shù)的工作原理。
影像捕捉
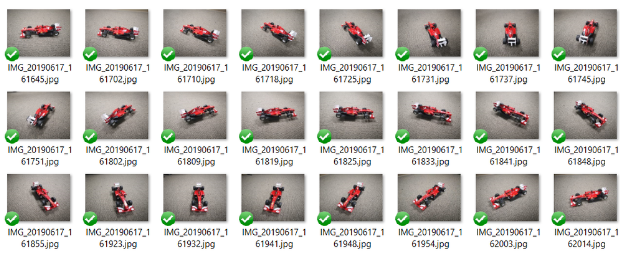
圖3 測(cè)試結(jié)構(gòu)的捕獲圖像
用戶圍繞測(cè)試對(duì)象拍攝二維照片,這些照片可以用智能手機(jī)或相機(jī)拍攝。為了獲得準(zhǔn)確的三維模型,建議用戶每15°左右拍攝一次,一共約24張照片。增加照片的數(shù)量可以提高模型的準(zhǔn)確性,但可能會(huì)增加處理時(shí)間。
在晶鉆儀器公司的三維模型重構(gòu)軟件中進(jìn)行二維圖像到三維模型的重構(gòu)

圖4 2D到3D重構(gòu)過(guò)程截圖
1. 加載圖片
將二維照片導(dǎo)入軟件,進(jìn)行圖像匹配和特征提取。
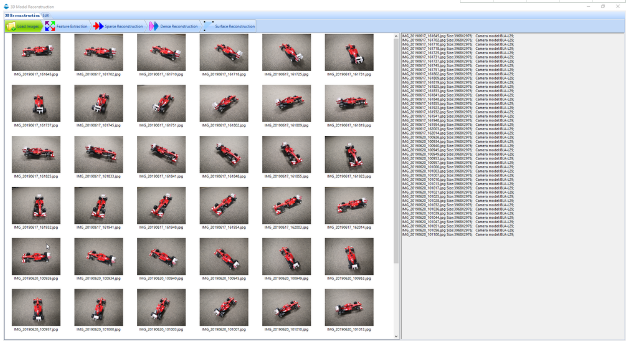
圖5 圖像加載到EDM 3D重構(gòu)軟件
2.特征提取
根據(jù)三角測(cè)量原理,使用兩張相應(yīng)的照片來(lái)確定測(cè)試對(duì)象的深度。15°間隔有助于獲得連續(xù)圖像之間的最優(yōu)重疊,從而進(jìn)一步提高圖像匹配。
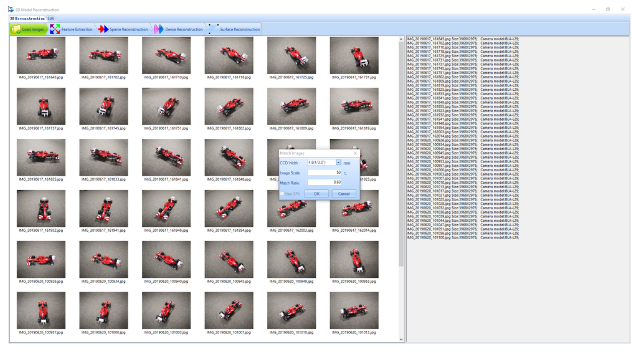
圖6 特征提取過(guò)程的參數(shù)設(shè)置
CCD的尺寸由照片的像素?cái)?shù)量和相機(jī)的焦距決定。更高的像素和更大的CCD尺寸意味著更好的照片分辨率。圖像比例尺基本上是指如果對(duì)照片進(jìn)行重新縮放以完成圖像匹配過(guò)程。默認(rèn)的匹配比0.6應(yīng)該足以獲得圖像之間的良好匹配。這在良好的圖像匹配和快速的特征提取過(guò)程之間取得了很好的平衡。
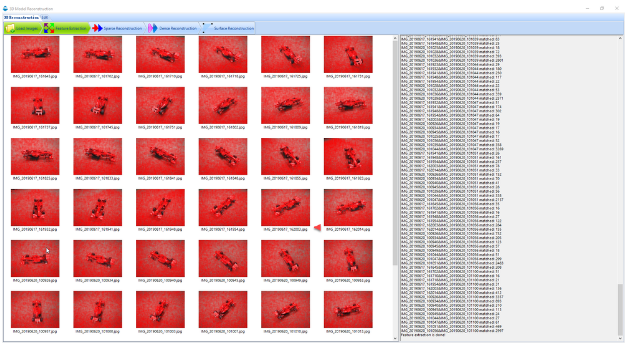
圖7 特征提取過(guò)程截圖
3.稀疏點(diǎn)和密集點(diǎn)重構(gòu)
從圖像中提取關(guān)鍵特征有助于建立測(cè)試結(jié)構(gòu)的稀疏點(diǎn)模型,這是一個(gè)快速和粗略的模型創(chuàng)建過(guò)程。軟件可以為重疊點(diǎn)模型籌夠自動(dòng)選擇初始圖像對(duì)。
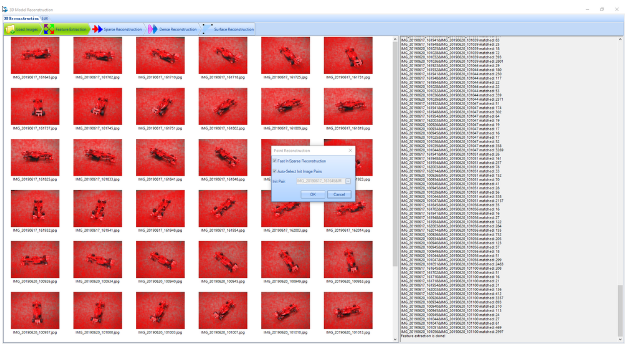
圖8 重構(gòu)過(guò)程的設(shè)置
利用特征提取和稀疏點(diǎn)重構(gòu)信息生成密集點(diǎn)三維模型。
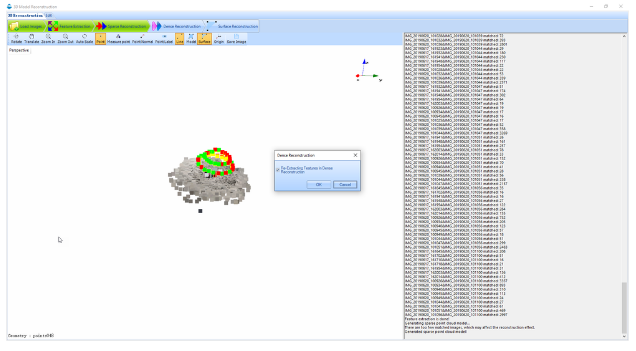
圖9 密集點(diǎn)重構(gòu)過(guò)程
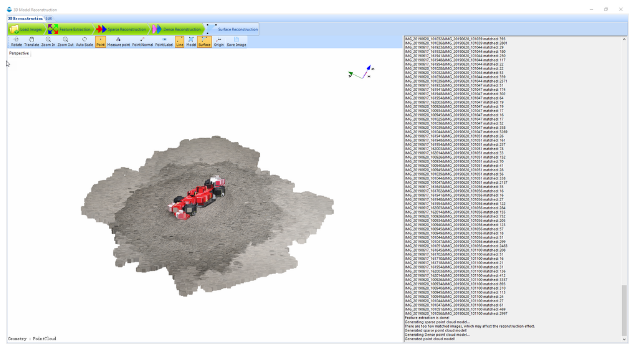
圖10 密集點(diǎn)模型屏幕截圖
4. 面重構(gòu)
在面重構(gòu)階段,通過(guò)自動(dòng)連接密集點(diǎn)模型中的所有點(diǎn),得到一個(gè)完整的三維模型。
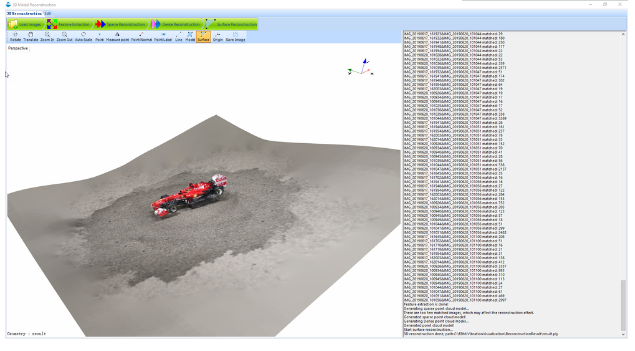
圖11 面重構(gòu)過(guò)程屏幕截圖
5.幾何編輯
一旦三維模型呈現(xiàn)幾何編輯器中,軟件中的各種功能可以用來(lái)修剪和修改三維模型的某些部分,以提高幾何模型的美觀。一個(gè)典型的操作是移除賽車(chē)模型的底板,如下面的截圖所示。得到的模型可以導(dǎo)出為.vvm格式,然后導(dǎo)入到EDM Model、VCS或DSA軟件用于振動(dòng)可視化應(yīng)用程序。
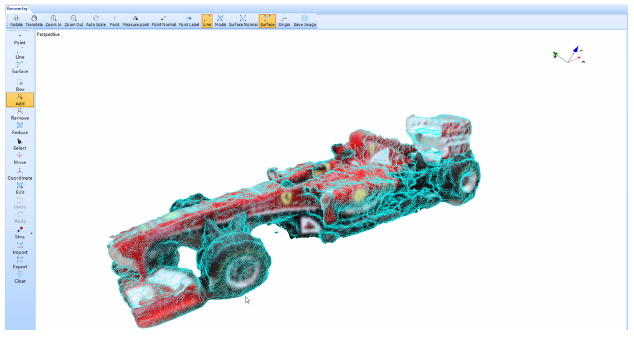
圖12 最終的3D模型
所構(gòu)建的三維模型用于實(shí)時(shí)(在線ODS)顯示測(cè)試結(jié)構(gòu)在測(cè)量過(guò)程中的振動(dòng),或在所有測(cè)量運(yùn)行完成后顯示結(jié)構(gòu)振動(dòng)(時(shí)域和頻域)。這將在下一節(jié)中詳細(xì)討論。
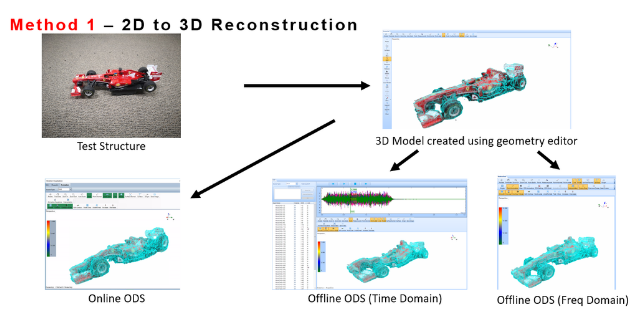
圖13 重構(gòu)3D模型過(guò)程概述
利用所建立的三維模型,可以在振動(dòng)試驗(yàn)和分析過(guò)程中,或振動(dòng)數(shù)據(jù)保存和記錄后進(jìn)行振動(dòng)可視化。將傳感器安裝在測(cè)試結(jié)構(gòu)上的不同測(cè)量點(diǎn)后,進(jìn)行振動(dòng)測(cè)試。將傳感器在測(cè)量點(diǎn)獲得的數(shù)據(jù)用于動(dòng)態(tài)的三維模型。對(duì)實(shí)測(cè)數(shù)據(jù)進(jìn)行全局插補(bǔ),計(jì)算未測(cè)點(diǎn)在整個(gè)結(jié)構(gòu)中的變形。振動(dòng)可視化提供了測(cè)試結(jié)構(gòu)在這些點(diǎn)上的動(dòng)畫(huà)。
當(dāng)三維模型可用時(shí),來(lái)自信號(hào)的數(shù)據(jù)可用于結(jié)構(gòu)的瞬時(shí)變形。通過(guò)振動(dòng)可視化和等高線圖的信息,用戶知道測(cè)試件的哪一部分變形更大或更小,從而可以優(yōu)化傳感器的位置。同樣,這一信息也可用于改變激勵(lì)位置,以獲得能產(chǎn)生最佳響應(yīng)的位置。這些信息還可以用于通過(guò)降低測(cè)試量級(jí)來(lái)修改測(cè)試項(xiàng)目的控制譜,以防止對(duì)結(jié)構(gòu)的任何損壞。
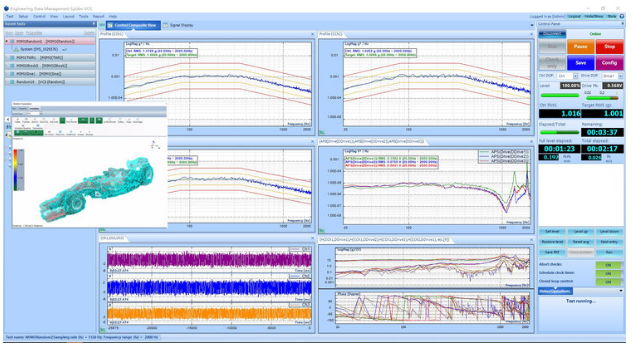
圖14 測(cè)試結(jié)構(gòu)工作撓度形狀的實(shí)時(shí)振動(dòng)可視化
在線振動(dòng)可視化功能可以使用來(lái)自輸入通道的塊數(shù)據(jù)或RMS數(shù)據(jù)來(lái)動(dòng)畫(huà)顯示測(cè)試結(jié)構(gòu)在這些傳感器位置上所經(jīng)歷的變形。塊數(shù)據(jù)用于被測(cè)結(jié)構(gòu)的振動(dòng)可視化的瞬時(shí)顯示。當(dāng)傳感器的塊數(shù)據(jù)被用來(lái)可視化測(cè)試物體的振動(dòng)時(shí),動(dòng)畫(huà)每40毫秒更新一次。塊選項(xiàng)更新過(guò)快,測(cè)試結(jié)構(gòu)的振動(dòng)可視化可能無(wú)法達(dá)到最大或最小變形。RMS選項(xiàng)顯示每個(gè)時(shí)間塊的RMS數(shù)據(jù),有助于觀察測(cè)試結(jié)構(gòu)變形的最大或最小位置。
振動(dòng)可視化不僅在實(shí)時(shí)分析(在線ODS)中有用,而且在測(cè)量完成后也很有幫助。通過(guò)對(duì)實(shí)測(cè)數(shù)據(jù)的分析和可視化,可以觀察試驗(yàn)結(jié)構(gòu)在時(shí)域和頻域上的振動(dòng)。
離線時(shí)域數(shù)據(jù)可以回放試驗(yàn)過(guò)程中各時(shí)刻的振動(dòng)。這在通過(guò)完全激勵(lì)監(jiān)測(cè)整個(gè)結(jié)構(gòu)的響應(yīng)中更有用。三維幾何模型需要大量的點(diǎn)來(lái)保證精度,但是用戶很難獲得大量的測(cè)量點(diǎn)。我們的軟件中的全局插值功能為用戶節(jié)省了大量的時(shí)間和精力。用戶設(shè)置測(cè)試,建立連接,收集合理數(shù)量的測(cè)量點(diǎn)的數(shù)據(jù),并使用這些數(shù)據(jù)插值計(jì)算未測(cè)量點(diǎn)在整個(gè)結(jié)構(gòu)中的變形。來(lái)自當(dāng)前測(cè)試的信息可以用于優(yōu)化未來(lái)測(cè)試的配置。
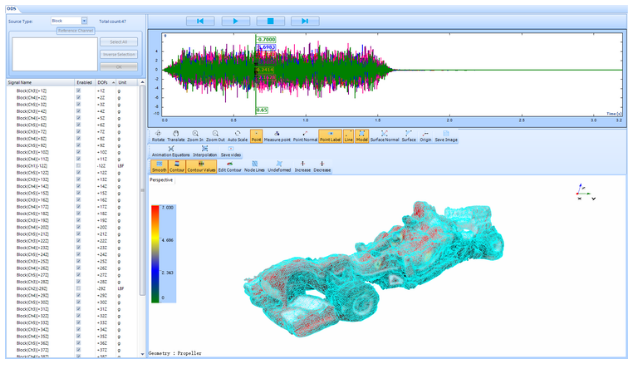
圖15 模態(tài)試驗(yàn)完成后,測(cè)試結(jié)構(gòu)的工作撓度在時(shí)域內(nèi)的振動(dòng)可視化
離線頻域數(shù)據(jù)的振動(dòng)可視化顯示了測(cè)試結(jié)構(gòu)在相關(guān)固有頻率下的振型。這些振型的動(dòng)畫(huà)進(jìn)一步引導(dǎo)用戶更好地理解測(cè)試結(jié)構(gòu)對(duì)輸入激勵(lì)的動(dòng)態(tài)響應(yīng)。這些信息可以用來(lái)改善測(cè)試對(duì)象的機(jī)械特性。比如對(duì)試驗(yàn)結(jié)構(gòu)的阻尼作相應(yīng)調(diào)整,以減少某些模態(tài)的重要性。
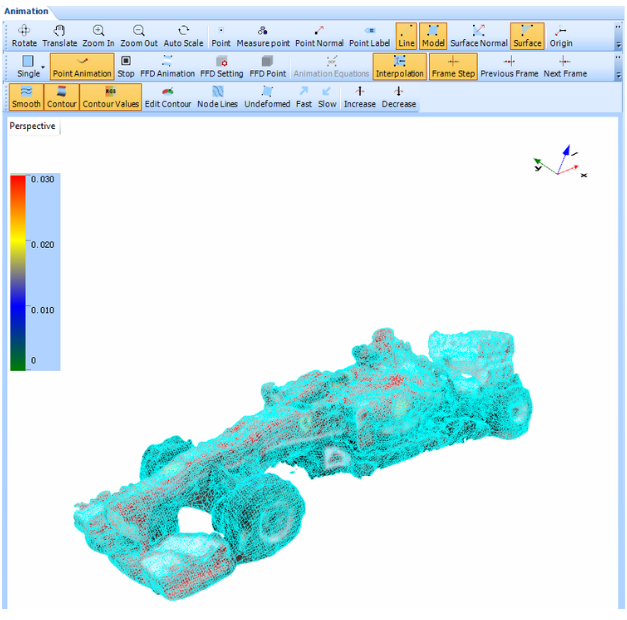
圖16 模態(tài)試驗(yàn)完成后,測(cè)試結(jié)構(gòu)的振型可視化