上世紀70年代,一批HP的工程師開發出了最早的數字式振動控制系統。他們在HP5451這款最早,最成功的信號分析儀上驗證了多種閉環控制算法。HP5451是以HP2100為平臺開發的,HP2100的儲存空間和計算能力都非常有限。70年代早期,在一個被稱作Time Date的公司內,兩位發明家Edwin Sloane 和 Charles Heizman開發了隨機振動控制器。Time Data后來被GenRad公司收購了,該項發明也成了頻譜動力學的一部分。
上世紀90年代早期,IBM-PC在工業上得到了普及。很多公司開始用PC作為平臺進行數據采集和動態信號分析。Date Physics公司聯合Lansmont公司,開發了第一款基于PC的數字振動器,稱為Lansmont TTVI控制器或DP540。
1996年,Joseph Driscoll ( Lansmont 公司總裁) and James Zhuge創建了Dactron公司,開發了下一代振動控制器。James Zhuge認為現有的技術存在技術上的缺陷,他找到了機遇改進了現有的技術。Dactron LASER公司將這些進步應用到產品,獲得了巨大的成功。PC當時被作為一個外圍設備一直沿用著。在新的控制器中,控制回路不通過PC。運用這一策略,采用浮點DSP結構,使得控制器回路時間更快,許多新的控制算法得以實現。
LASER是第一款采用多重浮點DSP處理器,24位A/D,USB連接計算機的振動控制器。早期的應用程序是基于微軟MFC程序開發的。這一結構允許系統提供更多的功能,同時保持簡潔的操作。數以千計的Dactron公司的LASER控制器被安裝在世界各地。2001年,Dactron被LDS收購。后者是當時世界上最大的ED振動器制造商。現在LDS被B&K收購了。
2010年,美國晶鉆儀器公司發布了Spider-81——下一代振動控制系統。Spider-81充分利用了現代化的硬件、信號處理算法和新的軟件技術。
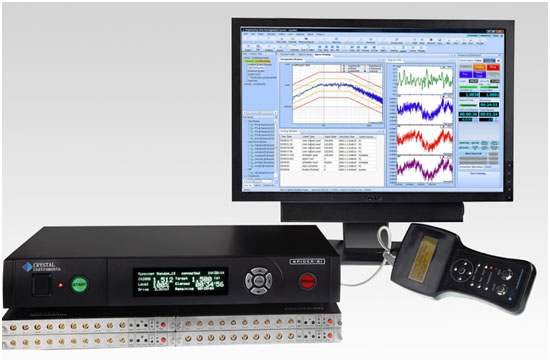
spider81第四代振動控制器
Spider-81是首款基于網絡的振動控制器,并集成了IEEE 1588時間同步技術。其基本模塊可配置4或8個輸入通道,并可擴展成1024個通道。它具有高可靠性,高測量精確,高控制性能及易用性。
Spider-81被視為第四代的振動控制器,因為它將網絡連接的時間同步性和嵌入式DSP技術融合在一起。這一策略極大的增加了控制的執行,系統可靠性和控制的失效保護。由于它是網絡化的,使用者可以將控制器放直接在振動臺附近操縱或在幾百米遠的控制室內操縱。
以下概述的是4代振動控制系統的結構:

4代振動控制系統的結構
實時性能
第一代振動控制器沒有真正的實時系統。實時意味著每個控制信號的樣本被用來計算下一個驅動信號的樣本。早期的微型計算機在計算系統的傳遞函數時會跳過輸入的數據幀。循環時間可達數秒之久。
第二代VCS是實時系統,所有的輸入樣本均用于計算驅動信號。該回路時間可達幾分之一秒。利用PC可以極大地改善用戶界面,并減少了產品費用。
第三代振動控制器產品可以稱為“over-real-time”。它擁有多任務而相同輸入數據的能力。例如,Dactron的隨機控制器,多個控制回路可以同時運行,以滿足不同頻帶的需要。在一個隨機正弦波控制器極端的情況下,兩個隨機控制核心,加上12正弦控制內核,都可以同步運行。控制回路時間被極大的縮短為毫秒級。
第一代和第二代控制器試圖滿足測試件機械特性的需要。對與一些要求苛刻的應用,控制系統可能需要5 kHz的實時控制頻寬,以及70 dB以上的控制動態范圍。該狀況在第三代VCS的出現而改變。由于使用了浮點處理器和Σ-Δ轉換器,實時帶寬控制和控制系統的動態范圍遠遠超出了外部機械的要求。從那時起,提高VCS的帶寬和控制動態范圍已經無法實現客戶的任何實際利益。它或多或少成了營銷策略。