摘要
地面振動(dòng)試驗(yàn)(GVT)包括對(duì)飛機(jī)和它的裝配部件進(jìn)行模態(tài)分析,研究結(jié)構(gòu)特性的變化。通過(guò)試驗(yàn)獲得的模態(tài)參數(shù)來(lái)驗(yàn)證分析模型。模態(tài)特征用于預(yù)測(cè)飛機(jī)的顫振,保證飛機(jī)符合安全要求。因此地面振動(dòng)試驗(yàn)(GVT)是飛機(jī)設(shè)計(jì)和開(kāi)發(fā)周期中至關(guān)重要的部分。

介紹
隨著資金限制和飛機(jī)開(kāi)發(fā)周期敏感性的增加,對(duì)飛機(jī)設(shè)計(jì)和試驗(yàn)技術(shù)提出新的挑戰(zhàn)。?為了確保飛機(jī)符合預(yù)期的標(biāo)準(zhǔn)和要求,有必要對(duì)飛機(jī)做徹底的結(jié)構(gòu)分析。使用復(fù)合材料和輕質(zhì)部件可以減輕飛機(jī)的質(zhì)量,然而這可能會(huì)對(duì)飛機(jī)的結(jié)構(gòu)性能產(chǎn)生未知的影響。為了應(yīng)對(duì)這種復(fù)雜性,需要進(jìn)行廣泛的測(cè)試,以測(cè)量、分析和驗(yàn)證飛機(jī)的設(shè)計(jì)。
飛機(jī)開(kāi)發(fā)周期中的測(cè)試用于評(píng)估認(rèn)證過(guò)程實(shí)施的通過(guò)/失敗標(biāo)準(zhǔn)。通過(guò)試驗(yàn)測(cè)量觀察飛機(jī)結(jié)構(gòu)是否符合認(rèn)證標(biāo)準(zhǔn),試驗(yàn)數(shù)據(jù)也有助于提高有限元模型的準(zhǔn)確性。 GVT 是測(cè)試過(guò)程的重要部分。高通道模態(tài)試驗(yàn)是指在飛機(jī)首次試飛前對(duì)整個(gè)飛機(jī)組件進(jìn)行測(cè)試,以確保滿(mǎn)足認(rèn)證要求。如果測(cè)試通過(guò)了認(rèn)證要求和標(biāo)準(zhǔn),證明飛機(jī)不存在顫振并且符合安全飛行標(biāo)準(zhǔn)。因此地面振動(dòng)試驗(yàn)對(duì)飛機(jī)的安全標(biāo)準(zhǔn)非常重要。GVT不僅是一種驗(yàn)證方法,還有助于優(yōu)化飛機(jī)的結(jié)構(gòu)設(shè)計(jì),提高結(jié)構(gòu)性能。
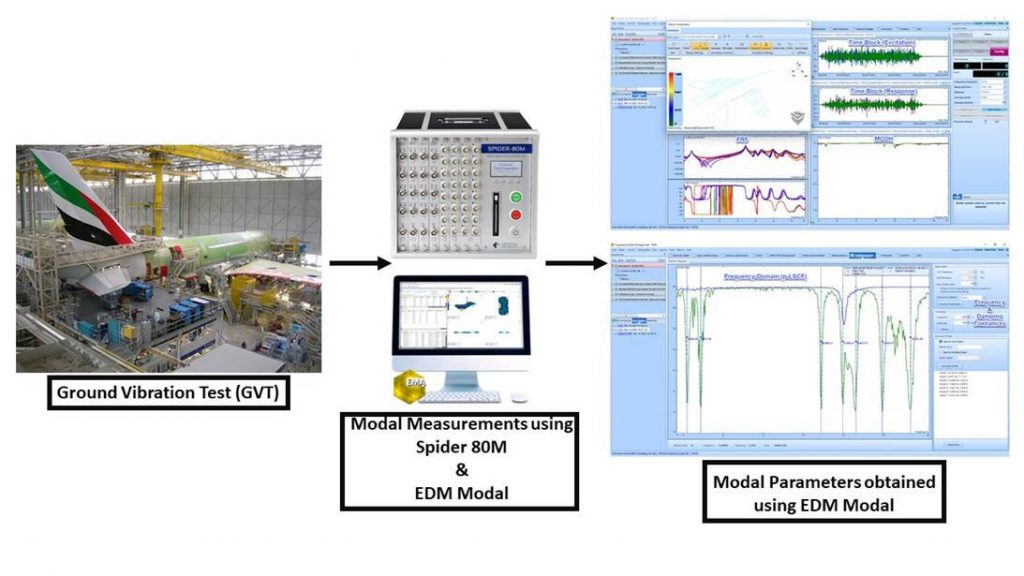 圖?2??飛機(jī)裝配體和子部件GVT模態(tài)試驗(yàn)的基本工作流程
圖?2??飛機(jī)裝配體和子部件GVT模態(tài)試驗(yàn)的基本工作流程
GVT的主要目的是驗(yàn)證仿真計(jì)算的顫振結(jié)果,因此通過(guò)對(duì)整個(gè)飛機(jī)裝配體進(jìn)行模態(tài)試驗(yàn),有助于對(duì)顫振預(yù)測(cè)的有限元模型進(jìn)行微調(diào)。通過(guò)模態(tài)試驗(yàn)獲得的模態(tài)參數(shù)包括飛機(jī)裝配體的固有頻率、阻尼和振型。此外,還進(jìn)行一些結(jié)構(gòu)耦合試驗(yàn),以對(duì)仿真模型進(jìn)行了關(guān)聯(lián)和改進(jìn),提高飛行的安全性,減輕飛行顫振。結(jié)構(gòu)耦合試驗(yàn)是指對(duì)在懸吊狀態(tài)下的飛機(jī)進(jìn)行激勵(lì),觀察傳感器的響應(yīng),分析飛機(jī)在實(shí)際飛行狀態(tài)下的行為。
理想情況下,GVT是在整個(gè)飛機(jī)組裝完成后的開(kāi)發(fā)周期最后階段進(jìn)行的。時(shí)間上的限制和多種測(cè)試條件要求地面振動(dòng)試驗(yàn)高效率地進(jìn)行。這些測(cè)試進(jìn)行地越快,結(jié)果對(duì)優(yōu)化設(shè)計(jì)越有幫助。EDM Modal軟件為執(zhí)行全面的地面振動(dòng)試驗(yàn)提供高效的工具,并獲得準(zhǔn)確的結(jié)果,幫助進(jìn)一步提高結(jié)構(gòu)性能。
工作流程
在整個(gè)測(cè)試階段中,有幾個(gè)重要的階段需要謹(jǐn)慎和及時(shí)的管理。初始階段是準(zhǔn)備測(cè)試,這可以通過(guò)使用仿真模型的結(jié)果進(jìn)行優(yōu)化。擁有一個(gè)高效的硬件系統(tǒng)可以幫助優(yōu)化激勵(lì)和數(shù)據(jù)測(cè)量過(guò)程。對(duì)測(cè)試數(shù)據(jù)的現(xiàn)場(chǎng)分析可以幫助確定測(cè)試是否可以在另一種測(cè)試條件下進(jìn)行。在完成所有的測(cè)量之后,需要對(duì)大量的數(shù)據(jù)進(jìn)行有效的處理和傳輸。對(duì)數(shù)據(jù)集進(jìn)行后處理提供了必要的結(jié)果,以滿(mǎn)足合規(guī)標(biāo)準(zhǔn)和安全要求。
準(zhǔn)備測(cè)試
對(duì)復(fù)雜試驗(yàn)結(jié)構(gòu)進(jìn)行有限元分析,得到仿真結(jié)果。這些仿真模型的動(dòng)力學(xué)特性可以通過(guò)GVT測(cè)試來(lái)優(yōu)化改進(jìn)。然而在對(duì)飛機(jī)裝配體進(jìn)行模態(tài)試驗(yàn)時(shí),存在許多不確定性:
- 地面振動(dòng)測(cè)試需要多少個(gè)傳感器?
- 這些傳感器在飛機(jī)裝配體的安裝位置在哪里?
- 為了充分激發(fā)所有模態(tài),模態(tài)激振器的安裝位置在哪里?
- 邊界條件是否正確建立,以使第一階柔性模態(tài)與最高階剛體模態(tài)很好地分離?
有限元模型有助于優(yōu)化試驗(yàn)配置。通常,對(duì)于大型結(jié)構(gòu),模態(tài)測(cè)量是一次性獲得的,即在所有測(cè)點(diǎn)安裝傳感器。但是,如果由于傳感器數(shù)量限制或數(shù)據(jù)采集系統(tǒng)的測(cè)量通道數(shù)量限制,采用巡回響應(yīng)模態(tài)試驗(yàn),則可以在有限元模型中模擬質(zhì)量附加效應(yīng),觀察其影響。此外,還可以有效地從仿真模型中得到激振器的最佳驅(qū)動(dòng)位置。一個(gè)良好的驅(qū)動(dòng)點(diǎn)位置有助于激勵(lì)起飛機(jī)裝配體的全部模態(tài)。模態(tài)試驗(yàn)所需的模態(tài)激振器的數(shù)量也可以根據(jù)出現(xiàn)在頻響函數(shù)(FRF)圖上所有感興趣的模態(tài)來(lái)規(guī)劃。模態(tài)保證準(zhǔn)則(MAC)圖不僅可以幫助優(yōu)化空間分辨率(即測(cè)量點(diǎn)的數(shù)量),而且可以有效地為模態(tài)測(cè)試選擇良好的傳感器位置,理想情況下,這將保證唯一地識(shí)別每階振型。最后,通過(guò)有限元模型可以導(dǎo)出模態(tài)試驗(yàn)幾何模型的測(cè)量網(wǎng)格,這一步驟有助于提高實(shí)驗(yàn)和仿真測(cè)試的集成。
地面振動(dòng)試驗(yàn)高效的硬件和軟件
GVT模態(tài)測(cè)試所使用的設(shè)備和儀器既耗時(shí)又復(fù)雜。大量的傳感器用來(lái)捕捉整個(gè)飛機(jī)裝配體的響應(yīng)。要確保每個(gè)傳感器被精確地安裝在測(cè)量點(diǎn)上。高通道測(cè)量存在誤差的空間,可能會(huì)對(duì)結(jié)果產(chǎn)生負(fù)面影響。通過(guò)“讀取所有TEDS”這樣的簡(jiǎn)單功能,并在網(wǎng)格上高亮顯示映射的測(cè)量點(diǎn),可以高效率地完成這個(gè)過(guò)程。
 圖?3?GVT測(cè)試中上百個(gè)傳感器使用讀取?TEDS功能
圖?3?GVT測(cè)試中上百個(gè)傳感器使用讀取?TEDS功能
通過(guò)讀取TEDS功能,測(cè)量ID、方向、靈敏度和輸入模式等參數(shù)可以從智能傳感器芯片中自動(dòng)讀取。
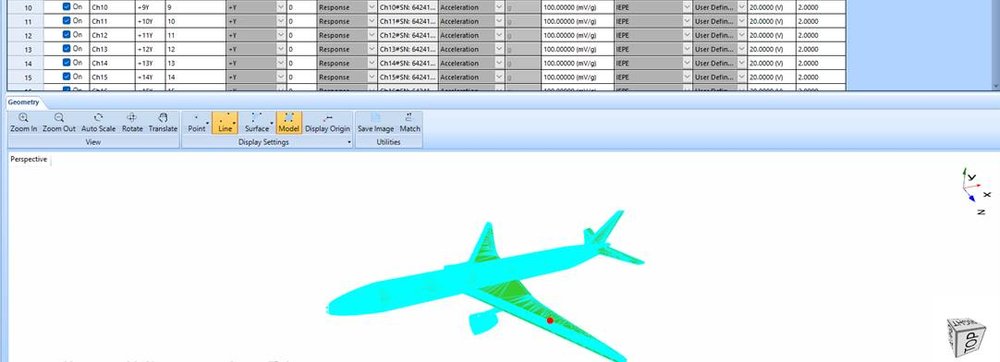 圖?4將傳感器位置映射到飛機(jī)裝配體上的測(cè)量網(wǎng)格
圖?4將傳感器位置映射到飛機(jī)裝配體上的測(cè)量網(wǎng)格
此外,硬件系統(tǒng)各通道高效率同步,大大提高了測(cè)量精度,采集可信的數(shù)據(jù)。Spider-80M和Spider-80Xi硬件系統(tǒng)機(jī)架的插槽支持模塊插拔,這對(duì)這類(lèi)測(cè)試非常方便。多個(gè)高通道系統(tǒng)可以組建成一個(gè)更高通道數(shù)的同步采樣系統(tǒng)。
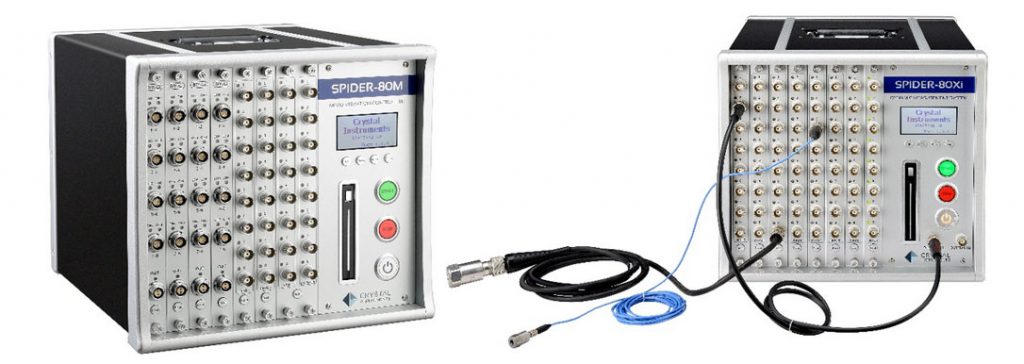 圖?5?Spider 80M & 80Xi 用于高通道數(shù)據(jù)采集
圖?5?Spider 80M & 80Xi 用于高通道數(shù)據(jù)采集
精確的時(shí)間同步技術(shù)使得所有通道之間的頻域相位匹配得非常好。雙ADC專(zhuān)利技術(shù)使得每個(gè)測(cè)量通道可以靈敏地檢測(cè)到6 μV~20V的信號(hào)。
在地面振動(dòng)測(cè)試中,飛機(jī)用彈性繩懸掛,模擬自由-自由邊界條件。判斷邊界條件良好的一般經(jīng)驗(yàn)法則是,最高階剛體模態(tài)的頻率小于第一階柔性模態(tài)頻率的1/10。
在飛機(jī)上安裝多個(gè)加速度傳感器,利用多個(gè)模態(tài)激振器對(duì)飛機(jī)進(jìn)行激振,得到多參考頻率響應(yīng)函數(shù)(FRFs). Spider系列高通道計(jì)數(shù)數(shù)據(jù)采集系統(tǒng)能有效地進(jìn)行這種多通道測(cè)試數(shù)據(jù)采集。
GVT模態(tài)激振器安裝在飛機(jī)的機(jī)翼和尾翼,也可以安裝在機(jī)身位置。多種輸出激勵(lì)類(lèi)型(如隨機(jī)、正弦等)用于多輸入多輸出(MIMO)模態(tài)試驗(yàn)。
EDM模態(tài)軟件具有完整的分析和測(cè)試套件,從軟件上能直觀地看到GVT模態(tài)試驗(yàn)的幾何模型、測(cè)量和數(shù)據(jù)處理過(guò)程。多種高效的曲線擬合算法可用于分析MIMO FRFs,以獲得飛機(jī)組裝體的模態(tài)參數(shù)。
進(jìn)行?GVT模態(tài)測(cè)量
在試驗(yàn)裝置安裝好并獲得適當(dāng)?shù)倪吔鐥l件后,將所有傳感器連接到硬件系統(tǒng),布置測(cè)量點(diǎn)和激勵(lì)點(diǎn),進(jìn)行GVT模態(tài)試驗(yàn),獲得所有頻響(FRF)。 ?GVT 試驗(yàn)可以使用多種激勵(lì)信號(hào)。模態(tài)錘可用于錘擊試驗(yàn)。通過(guò)模態(tài)激振器,可以使用多種激勵(lì)類(lèi)型,比如形隨機(jī)、突發(fā)隨機(jī)、正弦、掃頻正弦、偽隨機(jī)等。選擇恰當(dāng)?shù)妮敵黾?lì)信號(hào)可以提高測(cè)量結(jié)果的準(zhǔn)確性。
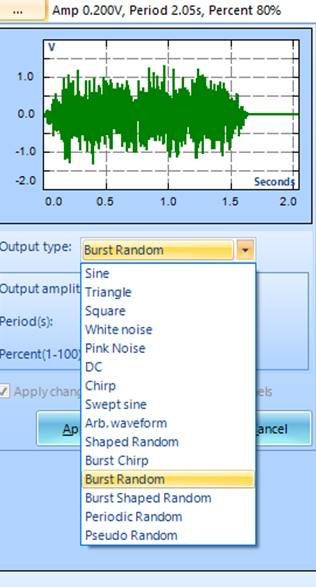 圖?6 飛機(jī)組裝體GVT模態(tài)試驗(yàn)中多種輸出激勵(lì)類(lèi)型可供選擇
圖?6 飛機(jī)組裝體GVT模態(tài)試驗(yàn)中多種輸出激勵(lì)類(lèi)型可供選擇
隨機(jī)激勵(lì)信號(hào)能激勵(lì)起的寬頻響應(yīng),利于在短時(shí)間內(nèi)捕獲所有感興趣的模態(tài)。
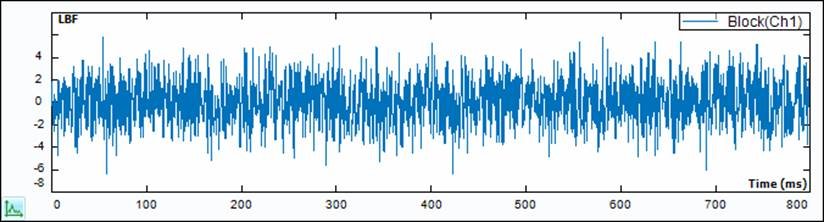 圖?7 GVT模態(tài)試驗(yàn)中使用白噪聲激勵(lì)起較寬的頻響
圖?7 GVT模態(tài)試驗(yàn)中使用白噪聲激勵(lì)起較寬的頻響
輸入突發(fā)百分比參數(shù),可以確保響應(yīng)自然衰減,而不必使用傳統(tǒng)的漢寧窗口。
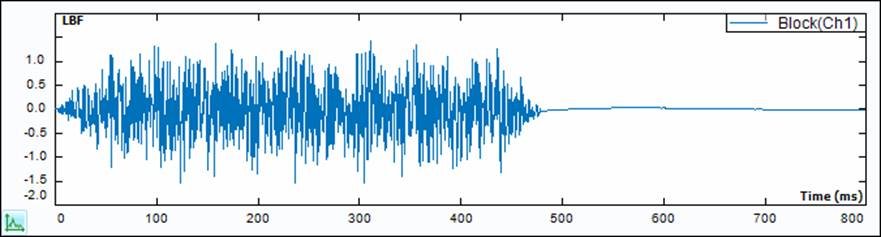 圖?8 使用突發(fā)隨機(jī)激勵(lì)確保飛機(jī)裝配體的響應(yīng)自然衰減
圖?8 使用突發(fā)隨機(jī)激勵(lì)確保飛機(jī)裝配體的響應(yīng)自然衰減
周期隨機(jī)每一個(gè)塊信號(hào)的相位和幅值都是隨機(jī)的。偽隨機(jī)也是周期性的隨機(jī)波形。與周期隨機(jī)的區(qū)別是,當(dāng)偽隨機(jī)塊信號(hào)生成時(shí),只有它的相位是隨機(jī)的。
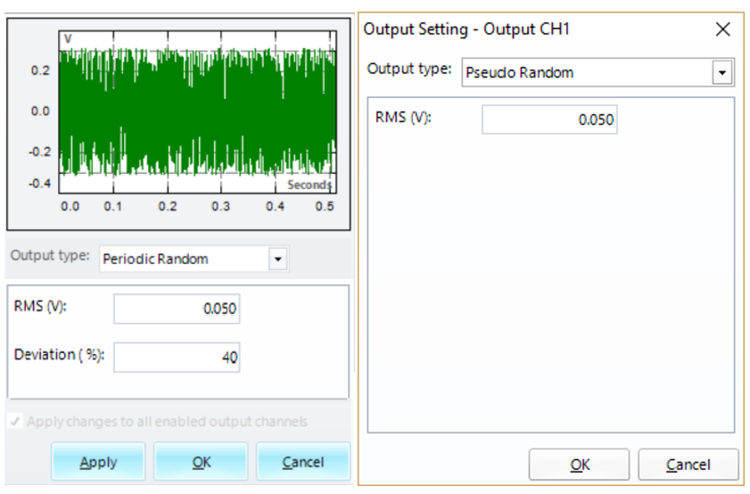 圖?9 用偽隨機(jī)&周期隨機(jī)激勵(lì)控制隨機(jī)性
圖?9 用偽隨機(jī)&周期隨機(jī)激勵(lì)控制隨機(jī)性
使用周期隨機(jī)或偽隨機(jī)激勵(lì)信號(hào),用戶(hù)可以設(shè)置兩個(gè)參數(shù):延遲次數(shù)和循環(huán)次數(shù)。
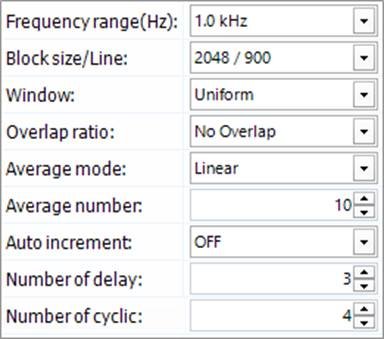 圖?10 GVT 模態(tài)試驗(yàn)中偽隨機(jī)&周期隨機(jī)激勵(lì)的延遲次數(shù)和循環(huán)次數(shù)
圖?10 GVT 模態(tài)試驗(yàn)中偽隨機(jī)&周期隨機(jī)激勵(lì)的延遲次數(shù)和循環(huán)次數(shù)
由于周期性響應(yīng)的性質(zhì),可以對(duì)這些數(shù)據(jù)塊進(jìn)行時(shí)域平均。之后計(jì)算所有相應(yīng)的頻譜,包括頻響(FRF)信號(hào)。這個(gè)計(jì)算過(guò)程將根據(jù)平均次數(shù)重復(fù)進(jìn)行,例如上圖中的設(shè)置是10。
使用周期輸出波形需要顯著更長(zhǎng)的測(cè)試時(shí)間,但會(huì)獲得更精確的測(cè)量結(jié)果。
形隨機(jī)和突發(fā)形隨機(jī)激勵(lì)類(lèi)型允許用戶(hù)定義驅(qū)動(dòng)PSD譜,這實(shí)現(xiàn)了在特定頻率范圍內(nèi)集中更多的能量。通過(guò)調(diào)整在各個(gè)頻率范圍內(nèi)的PSD幅值,改善對(duì)被測(cè)結(jié)構(gòu)的激勵(lì),這將增加響應(yīng)水平較低的某些區(qū)域的信噪比。
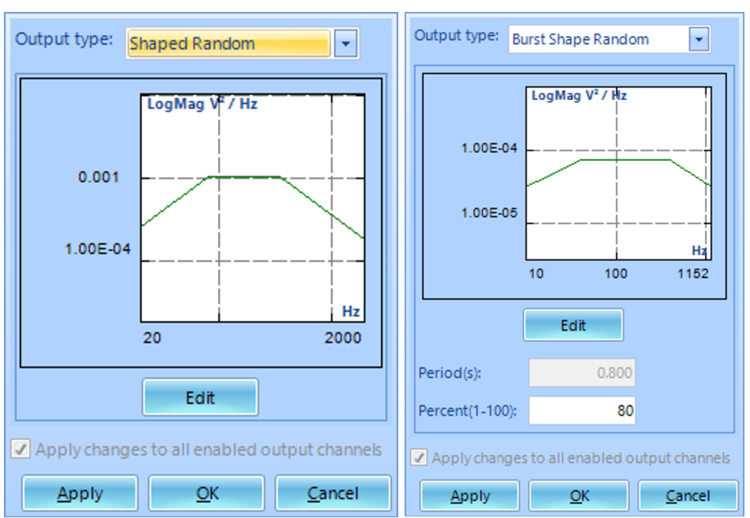 圖?11?形隨機(jī)&突發(fā)形隨機(jī)激勵(lì)的驅(qū)動(dòng)PSD譜
圖?11?形隨機(jī)&突發(fā)形隨機(jī)激勵(lì)的驅(qū)動(dòng)PSD譜
使用正弦激勵(lì),如掃頻和步進(jìn)正弦激勵(lì),將所有能量集中在一個(gè)頻率點(diǎn)上,有助于產(chǎn)生非常好的信噪比。當(dāng)測(cè)試這些大型結(jié)構(gòu)時(shí),寬帶激勵(lì)可能無(wú)法處理結(jié)構(gòu)的非線性,測(cè)試激勵(lì)量級(jí)可能達(dá)不到工作振動(dòng)量級(jí)。這種情況下,正弦激勵(lì)得到的頻響函數(shù)比隨機(jī)激勵(lì)得到的頻響函數(shù)質(zhì)量高。
 圖?12?GVT模態(tài)試驗(yàn)中MIMO正弦的不同控制策略
圖?12?GVT模態(tài)試驗(yàn)中MIMO正弦的不同控制策略
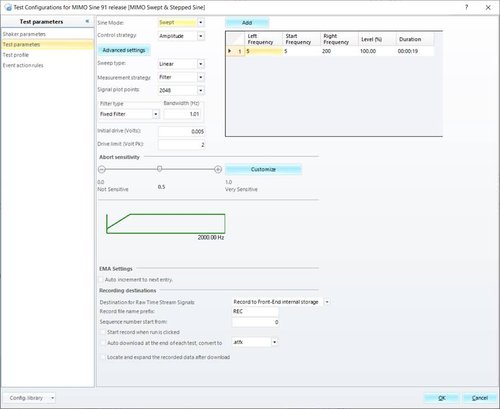
運(yùn)行MIMO Sine測(cè)試有兩種方法,第一種方法是定義驅(qū)動(dòng)目標(biāo)譜,第二種方法是定義目標(biāo)響應(yīng)或所需驅(qū)動(dòng)信號(hào)。第二種方法需要所謂的系統(tǒng)識(shí)別,首先要測(cè)量控制通道VS驅(qū)動(dòng)的頻響矩陣。有了這個(gè)已知的和為控制通道定義的目標(biāo)譜,就可以計(jì)算出所需的驅(qū)動(dòng)信號(hào)。
 圖?13 飛機(jī)GVT模態(tài)試驗(yàn)的MIMO正弦激勵(lì)
圖?13 飛機(jī)GVT模態(tài)試驗(yàn)的MIMO正弦激勵(lì)
在測(cè)試條件準(zhǔn)備好并做好上述設(shè)置之后,執(zhí)行GVT模態(tài)測(cè)量以獲得MIMO頻響FRF。采用不同的激勵(lì)技術(shù)對(duì)不同構(gòu)型的飛機(jī)裝配體進(jìn)行了試驗(yàn),觀察顫振的影響。根據(jù)不同的載荷和燃料配置進(jìn)行不同條件的測(cè)試,觀察提取的模態(tài)參數(shù)的變化。
后處理和曲線擬合
獲得MIMO 頻響FRF后,進(jìn)行后處理以進(jìn)一步分析。支持多種模態(tài)指示函數(shù):
- 多變量MIF
- 復(fù)數(shù)MIF
- 實(shí)數(shù)MIF
- 虛數(shù)Sum
模態(tài)指示函數(shù)幫助識(shí)別分析頻率范圍內(nèi)的感興趣模態(tài)。這些模態(tài)指示函數(shù)在系統(tǒng)的固有頻率上達(dá)到極大值(峰)或極小值(谷)。
 圖?14 不同的模態(tài)指示函數(shù)幫助識(shí)別GVT模態(tài)試驗(yàn)的模態(tài)
圖?14 不同的模態(tài)指示函數(shù)幫助識(shí)別GVT模態(tài)試驗(yàn)的模態(tài)
多變量?MIF?(MMIF) 利用特征值分解,在模態(tài)頻率處趨于極小值。多變量MIF的優(yōu)點(diǎn)是多個(gè)參考數(shù)據(jù)會(huì)產(chǎn)生有多個(gè)MIF,可以檢測(cè)出重根和耦合模態(tài)。
復(fù)數(shù)MIF?(CMIF) 基于頻響矩陣的奇異值分解,從所測(cè)頻響函數(shù)集中分析出主模態(tài)。CMIF在模態(tài)頻率處趨于極大值。
Sum函數(shù)是測(cè)量到的所有頻響函數(shù)的總和,并標(biāo)記了結(jié)構(gòu)模態(tài)頻率處的峰值。其思路是,把所有頻響一起求和,則大多數(shù)測(cè)量都會(huì)出現(xiàn)所有的模態(tài)。
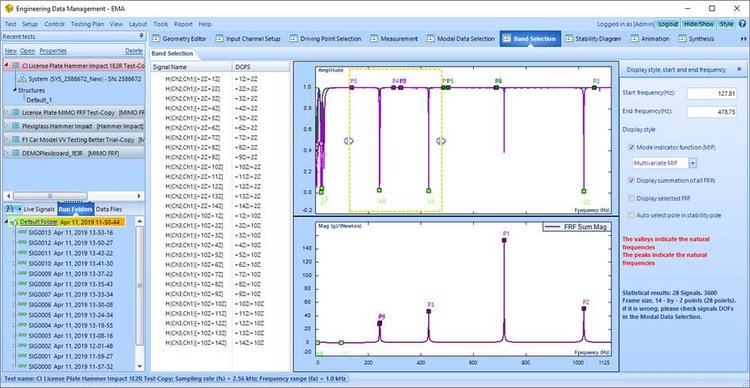 圖?15 GVT 測(cè)量FRFs分析頻率段選擇
圖?15 GVT 測(cè)量FRFs分析頻率段選擇
利用上述指示函數(shù),選擇最佳頻帶進(jìn)行曲線擬合,并從穩(wěn)定圖中提取模態(tài)參數(shù)。
穩(wěn)定圖是顯示和識(shí)別被測(cè)結(jié)構(gòu)模態(tài)的有效方法。穩(wěn)定性圖提供了在不同階模態(tài)下系統(tǒng)極點(diǎn)的圖形表示。通過(guò)繪制模型模態(tài)階次的變化來(lái)構(gòu)建穩(wěn)定圖。在各階模態(tài)下,采用相同的曲線擬合方法計(jì)算極點(diǎn)。
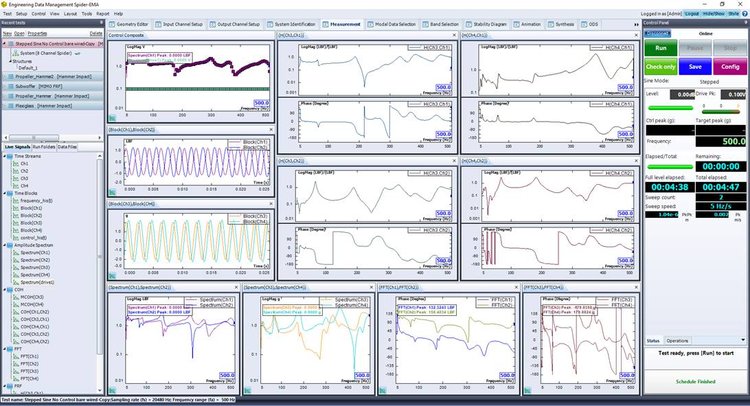
對(duì)于單參考點(diǎn)情況,曲線擬合方法采用最小二乘復(fù)指數(shù)法(LSCE)。而對(duì)于MIMO測(cè)試用例,頻響信號(hào)相對(duì)于多個(gè)參考信號(hào),對(duì)應(yīng)的曲線擬合方法采用多參考時(shí)域(PTD)方法。
 圖?16 多種曲線擬合方法用于提取飛機(jī)裝配體的模態(tài)參數(shù)
圖?16 多種曲線擬合方法用于提取飛機(jī)裝配體的模態(tài)參數(shù)
另一種算法稱(chēng)為Poly-X,是一種頻域曲線擬合方法,它是多參考最小二乘復(fù)頻域法(p-LSCF),為識(shí)別測(cè)試結(jié)構(gòu)的模態(tài)參數(shù)提供了一種更快、更高效的曲線擬合算法。
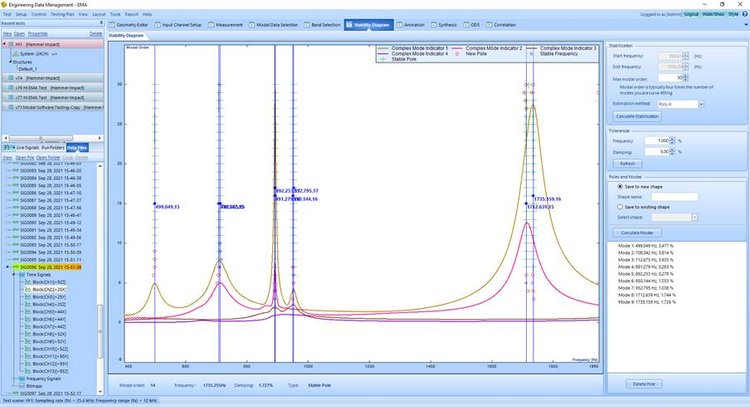 圖?17 穩(wěn)態(tài)圖計(jì)算固有頻率,阻尼和振型
圖?17 穩(wěn)態(tài)圖計(jì)算固有頻率,阻尼和振型
選擇穩(wěn)定極點(diǎn)(頻率穩(wěn)定、阻尼穩(wěn)定的極點(diǎn))后,得到系統(tǒng)的固有頻率、阻尼比和振型。
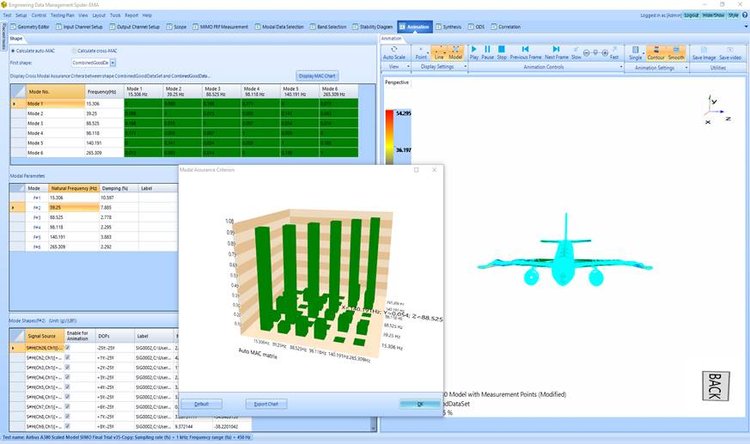 圖?18通過(guò)GVT模態(tài)測(cè)試獲得的飛機(jī)裝配體模態(tài)特性
圖?18通過(guò)GVT模態(tài)測(cè)試獲得的飛機(jī)裝配體模態(tài)特性
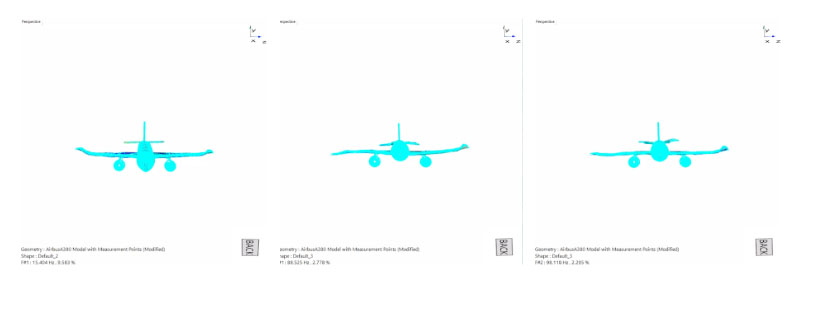 圖?19 飛機(jī)裝配圖的模態(tài)振型
圖?19 飛機(jī)裝配圖的模態(tài)振型
試驗(yàn)結(jié)果與有限元分析結(jié)果之間的良好相關(guān)性有助于驗(yàn)證飛機(jī)裝配體的設(shè)計(jì),并為其他測(cè)試(如常規(guī)模態(tài)測(cè)試等)提供了驗(yàn)證。通過(guò)這些測(cè)試證明飛機(jī)可以安全飛行。