如何進(jìn)行白車(chē)身模態(tài)分析實(shí)驗(yàn)?
第一步、電動(dòng)葫蘆可升降車(chē)身懸掛高度,合適的起吊高度可使激振器直接放在試驗(yàn)場(chǎng)地地面上,省去了墊高激振器的工裝。


第二步、對(duì)于小汽車(chē)白身車(chē)而言,第一階彈性模態(tài)一般在30Hz左右,考慮剛體模態(tài)小于第一階彈性模態(tài)的1/10,因而彈簧的剛度要求如下:
彈簧可在五金店購(gòu)買(mǎi),根據(jù)車(chē)身的重量進(jìn)行購(gòu)買(mǎi)(告訴店主吊多重的車(chē)身)。
第三步、可調(diào)吊具見(jiàn)下圖:


第四步、由于白車(chē)身模態(tài)試驗(yàn)至少要2個(gè)激振器,因而配套的功放也至少要2個(gè),對(duì)于滿負(fù)荷的MB功放而言,需要15A的電流,因此,試驗(yàn)使用的電源插線板的電流應(yīng)大于或等于30A。另外,插線板上三孔插頭個(gè)數(shù)不少于4個(gè)(1個(gè)數(shù)采、1個(gè)筆記本、2個(gè)功放)。
第五步、力傳感器的底座很難保證試驗(yàn)過(guò)程中始終不脫掉,因此,需多次在激振位置處粘貼AB膠,可先用裁紙刀去掉之前的AB膠,然后用砂紙打磨平整。
第六步、對(duì)于PCB 356A16、356A26、356A25等型號(hào)的三向加速度傳感器而言,配套的六邊形傳感器底座為19mm,因而需要19mm的開(kāi)口扳手拆卸粘貼后的底座。銳達(dá)代購(gòu)PCB傳感器,需要可聯(lián)系客服
第七步、標(biāo)識(shí)見(jiàn)下圖

1.測(cè)點(diǎn)分布
在汽車(chē)領(lǐng)域定義的直角坐標(biāo)系方向?yàn)椋簒方向?yàn)檐?chē)身方向;y方向?yàn)檐?chē)身橫向;z方向?yàn)榇怪狈较颍缦聢D所示。
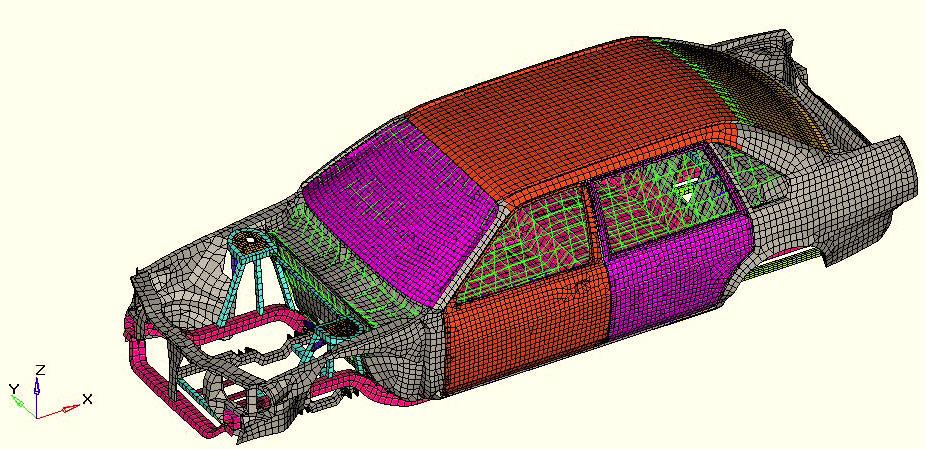
將車(chē)身平放在試驗(yàn)場(chǎng)地地面上,以車(chē)身方向的對(duì)稱(chēng)線作為Y=0的平面(XZ平面),測(cè)點(diǎn)按此平面成對(duì)稱(chēng)分布。以地面作為XY平面(Z=0),以車(chē)頭作為YZ平面(X=0)。測(cè)點(diǎn)平均間距約30cm。
沿橫向方向,車(chē)頂可劃分5個(gè)測(cè)點(diǎn),車(chē)底可劃分7個(gè)測(cè)點(diǎn)。測(cè)點(diǎn)分布盡量不要分布在簿弱的面板上(由于振型值是矢量,局部測(cè)點(diǎn)的振型值過(guò)大,會(huì)導(dǎo)致整體其他測(cè)點(diǎn)的振型值相對(duì)過(guò)小)。如車(chē)頂前后兩端的測(cè)點(diǎn)離邊線的距離稍遠(yuǎn)一點(diǎn),車(chē)輪位置的測(cè)點(diǎn)稍往里靠。
在確定測(cè)點(diǎn)位置時(shí),先不要編號(hào),等全部測(cè)點(diǎn)確定完畢后,再統(tǒng)一編號(hào),確定測(cè)點(diǎn)時(shí)按車(chē)身方向盡量成對(duì)稱(chēng)分布。編號(hào)的順序從車(chē)頭開(kāi)始(X=0的平面),沿+X方向,先左后右,先下后上的原則進(jìn)行,先編完同一X值平面,再到下一截面。這樣做的目的是方便測(cè)量各個(gè)測(cè)點(diǎn)的坐標(biāo)值用于建立幾何模型,盡量減少測(cè)點(diǎn)坐標(biāo)的測(cè)量,提高效率。由于對(duì)稱(chēng)分布,同一X值截面,X的值只需測(cè)量一次即可;Y軸測(cè)量對(duì)稱(chēng)兩測(cè)點(diǎn)的距離除以2即可。在沒(méi)有3D模型的情況下,幾何模型只能通過(guò)測(cè)量各個(gè)測(cè)點(diǎn)的坐標(biāo)的方式來(lái)進(jìn)行建立。
2.幾何建模
當(dāng)將整個(gè)車(chē)身建成一個(gè)組件時(shí),建議在輸入一定數(shù)量(如30個(gè))的測(cè)點(diǎn)坐標(biāo)之后,先進(jìn)行連線操作,不然輸入的測(cè)點(diǎn)過(guò)多,會(huì)導(dǎo)致分不清哪些點(diǎn)需要與哪些點(diǎn)相連。太多的測(cè)點(diǎn)會(huì)引起視角上的混亂。
3.傳感器選型
激振器推力桿上的傳感器盡量選擇阻抗頭,這樣方便進(jìn)行互易性檢查。不需要額外再粘貼加速度傳感器。
相對(duì)而言,激勵(lì)器法進(jìn)行白車(chē)身模態(tài)試驗(yàn),測(cè)點(diǎn)的加速度響應(yīng)不會(huì)超過(guò)2g,因此,可選用PCB 356A16型三向加速度傳感器。如果該型號(hào)傳感器不夠,可混用356A26、356A25等型號(hào)的三向加速度傳感器。
4.通道數(shù)
按2個(gè)激振器算,需要2個(gè)阻抗頭,占掉了4個(gè)通道。而每個(gè)測(cè)點(diǎn)要用一個(gè)三向加速度傳感器,則需要3個(gè)通道。因此,通道數(shù)不少于40通道,效率會(huì)較高。此時(shí),2個(gè)阻抗頭,12個(gè)三向加速度傳感器,剛好40通道。如果通道更多,相應(yīng)的傳感器也足夠,從效率角度出發(fā),則應(yīng)全部用上,會(huì)大大提高工作效率。
5.測(cè)量順序
由于要移動(dòng)傳感器,這樣給系統(tǒng)帶來(lái)了附加質(zhì)量的影響(系統(tǒng)變成為了時(shí)變系統(tǒng)),因此,為了防止局部附件質(zhì)量過(guò)大,傳感器按車(chē)身4個(gè)角點(diǎn)均勻分布。如12個(gè)三向傳感器,則可每個(gè)角點(diǎn)按車(chē)身方向?qū)ΨQ(chēng)布置3個(gè)傳感器。這樣附加質(zhì)量較均勻的分布到整個(gè)車(chē)身上,不會(huì)引起局部附加質(zhì)量明顯。
對(duì)已測(cè)量的測(cè)點(diǎn),需要進(jìn)行標(biāo)識(shí)。由于測(cè)點(diǎn)較多,不標(biāo)識(shí)已測(cè)量的測(cè)點(diǎn)會(huì)引起分不清測(cè)點(diǎn)是否已測(cè)量。
6.測(cè)量方向
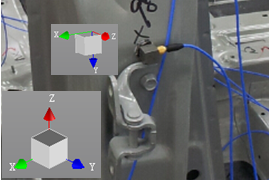
傳感器按XYZ順序從小到大接入到數(shù)采的通道中,每個(gè)測(cè)點(diǎn)的測(cè)量方向根據(jù)粘貼傳感器的方向進(jìn)行確定,如傳感器的X方向此時(shí)測(cè)量的是整體坐標(biāo)系的哪個(gè)方向。一定要弄清楚所有測(cè)點(diǎn)的方向,不然會(huì)引起振型錯(cuò)誤。如下圖,B柱上的傳感器的+X方向?yàn)楸畴x出線方向,傳感器的XYZ方向如圖中傳感器附近的方向如示,整體方向如左下角坐標(biāo)方向所示,那么傳感器的XYZ方向測(cè)量的整體坐標(biāo)方向?yàn)椋?X、-Z、+Y)。
測(cè)量時(shí),粘貼傳感器盡量與上一次的方式一致,這樣避免在軟件中再次修改測(cè)點(diǎn)的測(cè)量方向。粘貼傳感器時(shí)盡量使傳感器的方向與整體坐標(biāo)一致,這樣避免調(diào)整測(cè)點(diǎn)的轉(zhuǎn)角。當(dāng)測(cè)點(diǎn)坐標(biāo)與整體坐標(biāo)平面有夾角時(shí),可通過(guò)調(diào)整相應(yīng)測(cè)點(diǎn)的3個(gè)平面的轉(zhuǎn)角使該測(cè)點(diǎn)的歐拉角與粘貼時(shí)的傳感器方向保持一致。
每測(cè)量一批測(cè)點(diǎn),需要在測(cè)量前對(duì)該批次的測(cè)點(diǎn)ID和方向進(jìn)行修改。
7.測(cè)量參數(shù)
如沒(méi)有特殊要求,一般可設(shè)帶寬為102.4Hz,頻率分辨率為0.1Hz。采用猝發(fā)隨機(jī)信號(hào)作為激勵(lì)信號(hào),猝發(fā)時(shí)間可設(shè)為50%。如果結(jié)構(gòu)是線性系統(tǒng),平均次數(shù)可少些;如果結(jié)構(gòu)具有輕微的非線性,可加大平均次數(shù)。一般平均30次左右。
由于猝發(fā)隨機(jī)信號(hào)滿足FFT變換要求,不需要加窗。
FRF和相干是必須要測(cè)量的,建議測(cè)量時(shí)保存時(shí)域信號(hào),這樣方便檢查時(shí)域信號(hào)。
8.激勵(lì)力大小
激勵(lì)力的大小由兩級(jí)控制,一級(jí)為激勵(lì)信號(hào)的電壓量級(jí),另一級(jí)為功放的增益。為了有效地激勵(lì)出關(guān)心的所有模態(tài),激勵(lì)能量應(yīng)盡量大。激勵(lì)信號(hào)的電壓量級(jí)可首先設(shè)定為3V,然后調(diào)節(jié)功放增益。按以下原則進(jìn)行設(shè)置:調(diào)大信號(hào)的電壓量級(jí)和增益,激勵(lì)力都不再增大為止;或者看到車(chē)身出現(xiàn)明顯的剛體位移為止。一般激勵(lì)力約為60N左右,供參考。
9.互易性檢查
將力傳感器安裝在激勵(lì)位置附近的車(chē)架上,激勵(lì)方向沿+Z方向,先開(kāi)1#激振器,測(cè)量2#位置的加速度響應(yīng);然后開(kāi)2#激勵(lì)器,測(cè)量1#位置的加速度響應(yīng)。然后對(duì)比二者的FRF,看重合度。如果重合度高,則說(shuō)明結(jié)構(gòu)是線性結(jié)構(gòu),平均次數(shù)可減少;重合度差,說(shuō)明結(jié)構(gòu)具有非線性,平均次數(shù)應(yīng)加大。
10.激勵(lì)位置
為了使激勵(lì)能量均勻的分布到整個(gè)車(chē)身上,激勵(lì)位置可選左前輪和右后輪附近或者右前輪和左后輪附近。激勵(lì)位置剛度要大一些,這樣能量再能傳遍整個(gè)結(jié)構(gòu)。另一方面,至少有一個(gè)激振器要進(jìn)行傾角激勵(lì),或者兩個(gè)激振器都傾角激勵(lì)。
11.其他檢查
其他檢查包括相干檢查、激振力不相關(guān)檢查、模態(tài)數(shù)據(jù)一致性檢查等。
激勵(lì)力不相關(guān)檢查主要通過(guò)PCA分析得到,如果激勵(lì)力相關(guān),則2個(gè)激振器與一個(gè)激振器的作用是相同的了。
每測(cè)量完一批測(cè)點(diǎn)之后,應(yīng)立即對(duì)該批次的測(cè)點(diǎn)分方向進(jìn)行檢查,看是否有異樣的FRF,如果出現(xiàn)異樣,則需要重新測(cè)量該批次。如果正常,則移動(dòng)傳感器到下一批次。
測(cè)量開(kāi)始前需要對(duì)通道連接、測(cè)點(diǎn)的方向進(jìn)行檢查,以防出錯(cuò)。
測(cè)量完畢后,首先不要?jiǎng)h除所有的測(cè)試設(shè)備,應(yīng)先對(duì)數(shù)據(jù)進(jìn)行全面的檢查,包括是否有丟失測(cè)點(diǎn),是否有過(guò)載的測(cè)點(diǎn)等。
12.模態(tài)測(cè)試軟件的選擇
使用美國(guó)晶鉆公司研發(fā)的模態(tài)測(cè)試分析軟件EDM Modal,即實(shí)驗(yàn)?zāi)B(tài)分析系統(tǒng)(EMA),它可以直接采集測(cè)試數(shù)據(jù),生成模態(tài)振型圖。
14.其他事項(xiàng)
導(dǎo)線兩端都需要編號(hào)。
試驗(yàn)過(guò)程中,嚴(yán)重觸碰車(chē)身或踩踏試驗(yàn)導(dǎo)線。
移動(dòng)和粘貼傳感器的動(dòng)作力度要小,以免引起車(chē)身運(yùn)動(dòng)過(guò)大,導(dǎo)致力傳感器與結(jié)構(gòu)脫開(kāi)。