完成準備步驟后,可以開始動平衡測試。
1 — 準備運行
進入 Onsite Measurement 頁面選擇 Rotor Balancing,如圖 5。按 F6 鍵開始運行Balancer,如圖 6。進入 Start 頁面,該頁提示相關準備操作,按 F1 輸入該次動平衡的名稱,按 F6 繼續下一步,開始設置參數
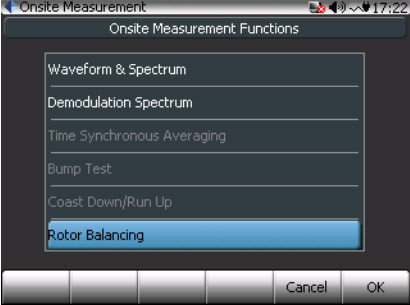
圖五
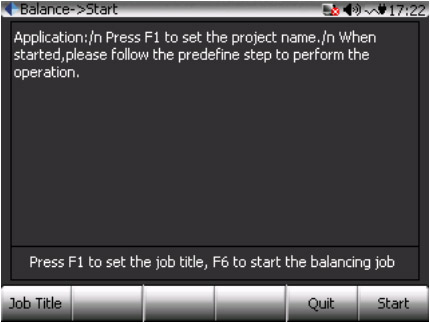
圖六
2 — 參數設定
進入參數設定后,參數列表如圖 7 顯示。
- 基本參數設定
Plane Number:指定動平衡面數,輸入 1 表示進行單面動平衡,輸入 2 進行雙面動平衡。
Average Type:指定信號譜的平均方式,none,Linear,Exponential 三種。
Average Number: 選擇平均次數。
Weight Unit:指定質量單位。分別為 g,kg,oz,lbs,程序自動進行相應的轉換。
Length Unit: 指定長度單位。分別為 mm,cm,m,inch,ft,程序自動進行相應的轉換。
Movement: 指定安裝質量的參考方向。分別為 Against Rotation 和 With Rotation
Vibration Display Type:指定需要觀察的量綱,分別為 Acceleration,Velocity和 Displacement。
Measurement Type: 指定信號檢測和顯示方式,分別為 Peak-Peak,Peak,RMS。 - 測速計設置
按 F1 進入測速計設置頁面,如圖 8。改頁面可以指定轉速信號觸發方式和觸發閾值。設置好相應的值后按 F5 退出到主設置頁面。 - 高級參數設置
按 F2 進入高級設置頁面,如圖 9。該頁面允許您指定顯示單位,儀器會自動根據您設置的單位進行相應的數據轉換。
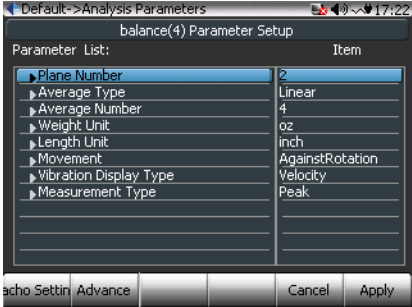
圖7

圖8
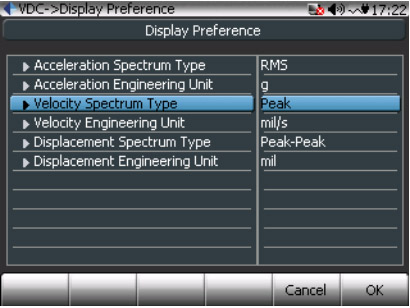
圖9
3 — 初始運行
一切準備就緒之后,啟動機器,按 F6 開始程序初始運行,讀取機器的不平衡狀態,見圖 10。該頁面顯示了每個面的振動幅度(Mag)和相位(Phase)值。待各數值穩定之后,按 Next 進行下一步驟。程序自動記錄數據。
功能按鈕作用如下:
- F1 Traces,指定當前顯示的內容,可以選擇原始數據波形圖或者振動相位圖。
- F2 Procedure 顯示 balance 進行的步驟,在運行過的步驟中,可以回退。
- F3 Redo 清楚當前數據重新開始處理。
- F4 Summary 顯示所有運行的數據結果,包括各次振幅相位,加重的質量等。
- F5 Tool 工具菜單,包括試重計算、質量分割、質量合成等。
- F6 Next 進行下一步驟。

圖10
4 — 平面 1 加試重
關閉機器,選擇合適的質量放置在面 1 的適當位置,如圖 11。該質量需要符合所謂的 30/30 原則,即加上質量后機器的振幅改變 30%以上,或者幅度改變 30%以上,或者 2者都改變 30%以上,這樣計算的結果才精確。按 F1 輸入一些參數可以由程序自動計算出
所需加重的重量。
圓形圖提示您需要安放質量的位置。為以最小的質量獲得最大的效果,一般質量都安放在轉子的外表面。確認在面 1 固定好選擇的質量后,按 F6 進行下一步。
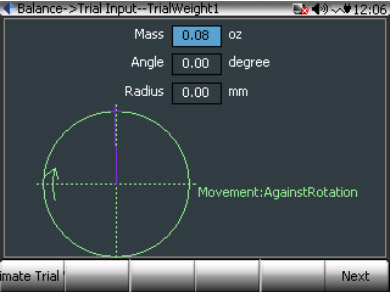
圖11
5 – 加試重運行 1
啟動機器,待 RPM 穩定之后,顯示 2 個面的振動和相位值,如圖 12。待讀值穩定之后,按 F6 進行下一步。若不滿意該值,可以按 F3 重新開始。
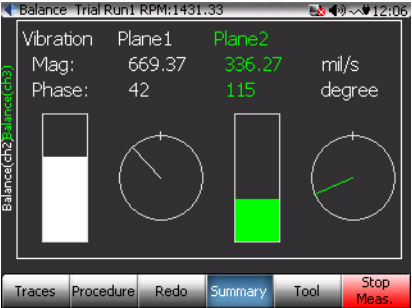
圖12
6 – 平面 2 加試重
關閉機器,同時移除面 1 的配重。重復 4 的步驟,如圖 13,確認在面 2 固定好適當的質量后,按 F6 進行下一步。

圖13
7 – 加試重運行 2
重復步驟 5,如圖 14。待數值穩定后,按 F6 進行下一步。
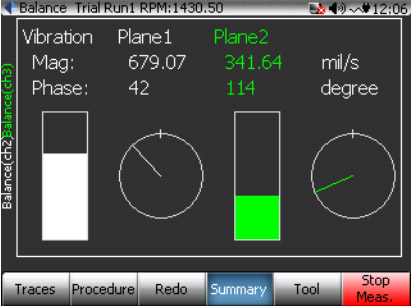
圖14
8 – 計算加重重量和位置
關閉機器,移除面 2 的配重。完成以上步驟之后,Coco 就能自動計算出機器平衡所需要的質量和安放相位,如圖 15-16。表中給出的前 2 個值分別為需要的質量和相位,第三個值在您有輸入的情況下才會顯示正確的值。一般來說,這個值就是轉子橫截面的
半徑。
圓形圖顯示了你所需要安放的位置,圖的頂部表示的是反射點的位置。要注意的是這個位置必須與您之前設定的反射點及轉子的旋轉方向結合才能確定。 根據表和圖的信息,在轉子正確位置上固定正確的質量之后,就可以運行下一步觀察經過動平衡之后的振動和相位。如果需要移除質量,只要在給定相位 180 度的反方向上移除給定的質量就可以了。
確認在合適的位置固定好質量后,就可以進行下一步了。
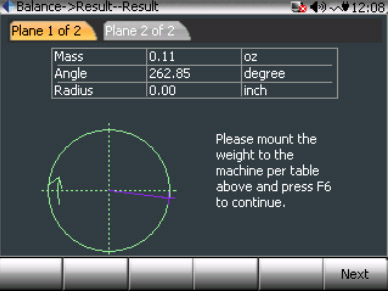
圖15

圖16
9 – 正確配重后的運行
啟動機器,待 RPM 穩定之后,可以看到相應的振動和相位值,如圖 17。一般來說,正確配重之后,機器的振動會降低很多。如果出現正確配重之后機器的振動變化不大或者加大了,那么請檢查以下幾個方面:
- 檢查傳感器和各種裝置是否安放準確,確認相位標定是否準確,是否放置在相反的位置上。再檢查 channel table 的設置,確認各個值跟傳感器的標稱值一致,使用的信號輸入方式正確。如果有出入,請設置準確之后重新開始動平衡。
- 準備 2 個傳感器,放置在轉軸同一個位置的水平和垂直方向下,啟動程序。如果機器不平衡是機器振動的主要原因,那么 2 者的相位差應該是 90 度左右,而振動的幅值相差基本不大(這跟機器的基座有關系,具體請按實際情況確認)。如果不符
合,那么請檢查機器的振動頻譜圖。 - 進入 Onsite Measurement,查看機器的振動頻譜圖,檢查機器振動的頻譜是否符合機器不平衡的頻譜特征。如果確認機器的振動不是由不平衡造成的,那么加重可能會導致機器的振動加大。需要先修正其它原因造成的機器振動再重新進行動平衡。
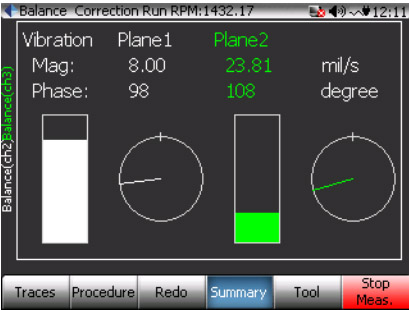
圖17
10 – 修正運行
由于操作過程存在一定的誤差,即使加上正確的質量之后,也會存在一定的不平衡量,如果不符合您的標準,可以按 F6,軟件會提示您進行修正運行還是結束此次運行。修正運行可以持續多不,直到符合您的要求或者無法再改進為止。
11 – 結束運行
一旦您介紹運行之后,軟件會把所有運行的數據顯示出來以供您查看,如圖 18。軟件會自動保存數據,如果有需要可以重新加載這些數據。
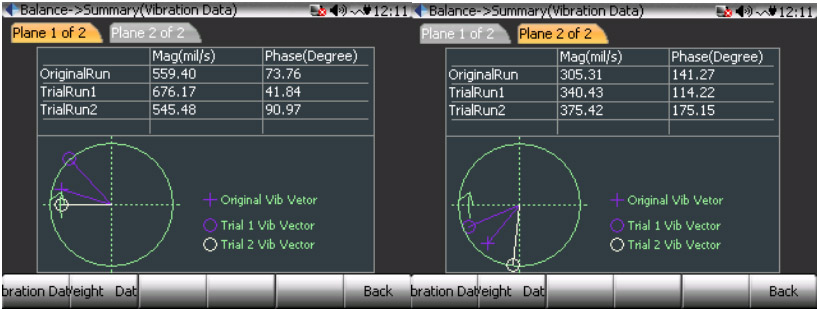
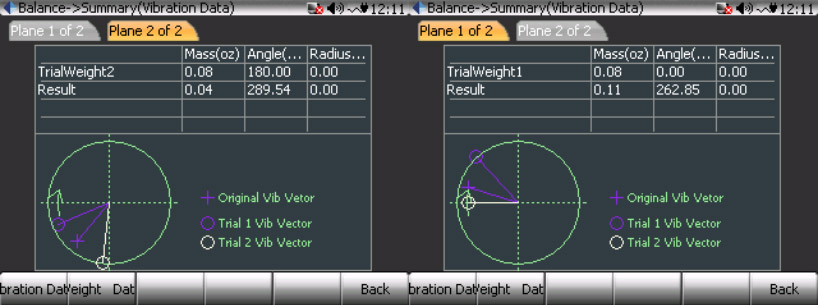
圖18
1