The post 結(jié)構(gòu)疲勞試驗(yàn)方案-疲勞損傷譜FDS appeared first on 杭州銳達(dá)數(shù)字技術(shù)有限公司.
]]>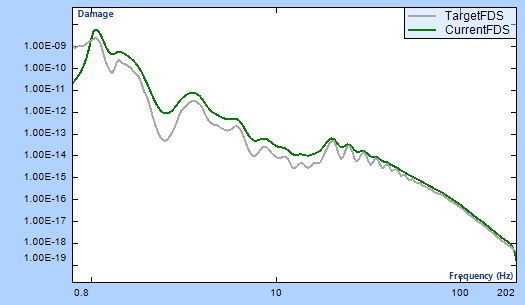
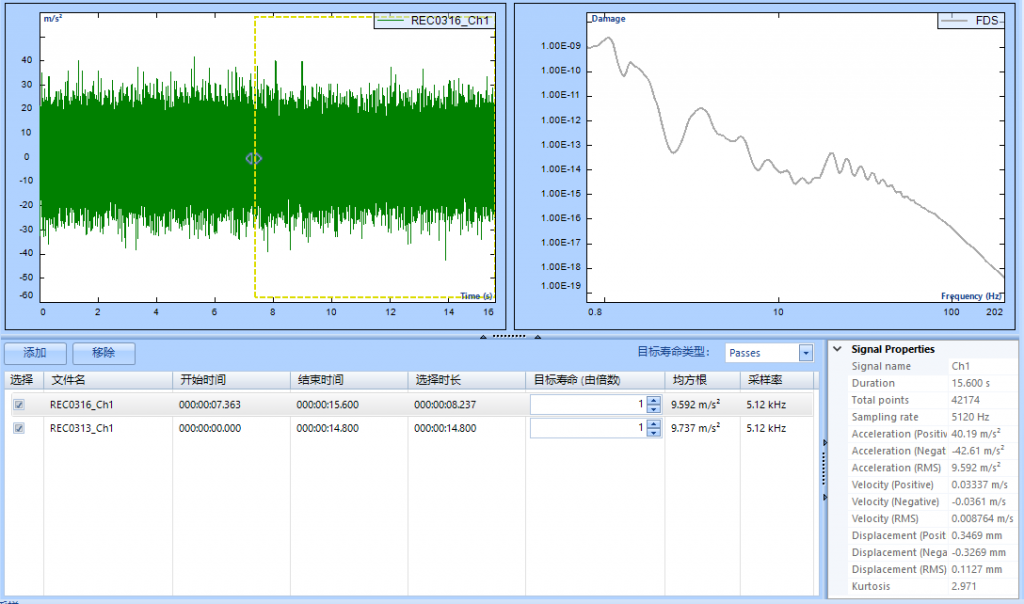
通過(guò)頻域響應(yīng)PSD的統(tǒng)計(jì)參數(shù)和應(yīng)力概率密度函數(shù)PDF計(jì)算的疲勞損傷譜去一步步擬合時(shí)域單自由度響應(yīng)的目標(biāo)生命時(shí)長(zhǎng)的疲勞損傷譜達(dá)到疲勞等效。然后用PSD作為振動(dòng)目標(biāo)譜進(jìn)行隨機(jī)疲勞試驗(yàn)。
The post 結(jié)構(gòu)疲勞試驗(yàn)方案-疲勞損傷譜FDS appeared first on 杭州銳達(dá)數(shù)字技術(shù)有限公司.
]]>The post MIMO振動(dòng)系統(tǒng)抑制控制(Control Null)功能 appeared first on 杭州銳達(dá)數(shù)字技術(shù)有限公司.
]]>晶鉆儀器提供獨(dú)特的解決方案。晶鉆儀器多輸入多輸出隨機(jī)振動(dòng)控制軟件提供振動(dòng)抑制(Control Null)功能,用戶只需在軟件里做簡(jiǎn)單的設(shè)置,就可以在三軸振動(dòng)臺(tái)上做單軸或兩軸振動(dòng)控制試驗(yàn)。用戶可以選擇在三個(gè)方向上的任意方向做振動(dòng)試驗(yàn)。通過(guò)這個(gè)功能,軟件抑制某個(gè)方向上的振動(dòng),并且仍對(duì)另外的方向進(jìn)行振動(dòng)控制。
通過(guò)振動(dòng)抑制(Control Null)功能,“Control Null”通道的振動(dòng)目標(biāo)量級(jí)將最小化。這讓用戶實(shí)現(xiàn)了在三軸振動(dòng)配置中只做一個(gè)方向的振動(dòng),而另外兩個(gè)方向抑制振動(dòng)。經(jīng)過(guò)DSP計(jì)算的抑制方向驅(qū)動(dòng)信號(hào)實(shí)現(xiàn)抑制方向最低可能響應(yīng)。當(dāng)主導(dǎo)方向做振動(dòng)控制時(shí),抑制方向的響應(yīng)顯著降低。
我們用案例來(lái)說(shuō)明這個(gè)功能的作用。我們分別用每個(gè)方向推力20kN的三軸振動(dòng)臺(tái)和小型三軸振動(dòng)臺(tái)來(lái)演示這一功能。
 圖1 ?20kN三軸電動(dòng)振動(dòng)臺(tái)
圖1 ?20kN三軸電動(dòng)振動(dòng)臺(tái)
 圖2 小型三軸振動(dòng)臺(tái)
圖2 小型三軸振動(dòng)臺(tái)
Spider-80M是晶鉆儀器公司研發(fā)的專門用于MIMO振動(dòng)試驗(yàn)的振動(dòng)控制器,最多支持8個(gè)輸出。硬件搭配晶鉆儀器的EDM MIMO VCS軟件,為隨機(jī)振動(dòng)試驗(yàn)提供精確、實(shí)時(shí)、多通道控制。
 圖3 晶鉆儀器Spider-80M MIMO振動(dòng)控制器
圖3 晶鉆儀器Spider-80M MIMO振動(dòng)控制器
試驗(yàn)細(xì)節(jié):
1.縮放NAVMAT目標(biāo)譜RMS量級(jí)為1g,用于隨機(jī)振動(dòng)控制試驗(yàn);
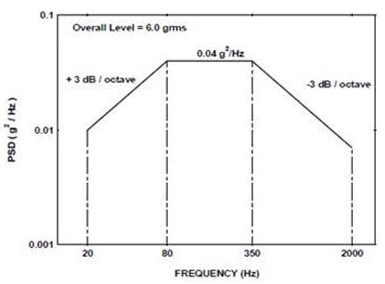 圖4 NAVMAT目標(biāo)譜
圖4 NAVMAT目標(biāo)譜
2.首先,運(yùn)行一個(gè)X方向的單軸振動(dòng)控制試驗(yàn),測(cè)量另外兩個(gè)方向Y向和Z向的響應(yīng)。振動(dòng)控制試驗(yàn)在三軸電動(dòng)振動(dòng)系統(tǒng)上進(jìn)行。
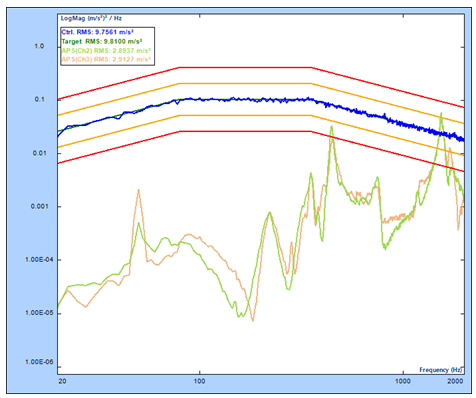 圖5 ?X方向單軸隨機(jī)振動(dòng)控制試驗(yàn),不啟用Control Null
圖5 ?X方向單軸隨機(jī)振動(dòng)控制試驗(yàn),不啟用Control Null
3.用相同的目標(biāo)譜在三軸電動(dòng)振動(dòng)系統(tǒng)上做試驗(yàn),X向做振動(dòng)控制,Y和Z向啟用Control Null
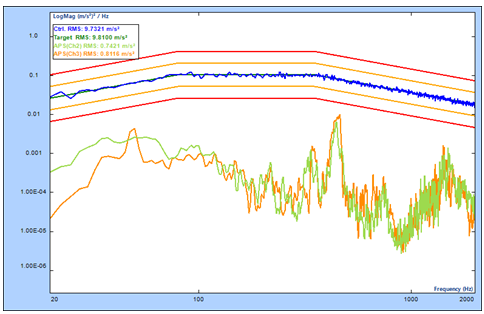 圖6 ??三軸隨機(jī)振動(dòng)控制試驗(yàn),Y向和Z向啟用Control Null
圖6 ??三軸隨機(jī)振動(dòng)控制試驗(yàn),Y向和Z向啟用Control Null
4.下表比較了單軸試驗(yàn)和啟用Control Null的三軸試驗(yàn)結(jié)果,我們發(fā)現(xiàn)啟用Control Null后,非主要方向Y和Z向的RMS幾乎是沒(méi)啟用Control Null時(shí)的四分之一。
| 方向 | 未啟用Control Null(單軸試驗(yàn))的RMS值 | 啟用Control Null(三軸試驗(yàn))的RMS值 | 區(qū)別 |
| X(控制) | 9.75m/s2 | 9.73m/s2 | N/A |
| Y | 2.89m/s2 | 0.74m/s2 | 抑制74.4% |
| Z | 2.91m/s2 | 0.81m/s2 | 抑制72.2% |
表1 ??啟用和未啟用Control Null振動(dòng)控制試驗(yàn)的RMS值比較
對(duì)于單軸振動(dòng)控制試驗(yàn),非主導(dǎo)方向(Y和Z)的RMS值是主導(dǎo)方向(Z)的30%。對(duì)于啟用Control Null功能后的三軸試驗(yàn),非主導(dǎo)方向(Y和Z)的RMS值是主導(dǎo)方向(Z)的8%。這說(shuō)明Control Null功能能夠有效抑制非主導(dǎo)方向的振動(dòng)。
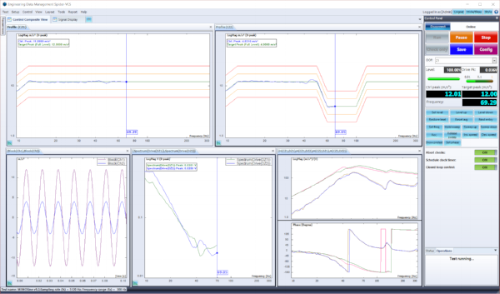
5.我們?cè)谛⌒腿S振動(dòng)臺(tái)上做類似的試驗(yàn)。X向和Y向啟用Control Null功能,Z向即垂直方向做振動(dòng)控制。
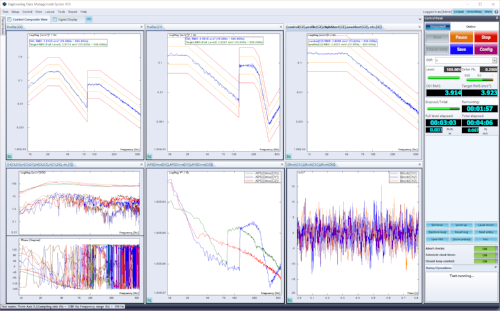
 圖7 ?三軸隨機(jī)振動(dòng)控制,X和Y啟用Control Null
圖7 ?三軸隨機(jī)振動(dòng)控制,X和Y啟用Control Null
X,Y和Z向的APS和塊信號(hào)說(shuō)明了X向和Y向的振動(dòng)被抑制,而Z向仍然做振動(dòng)控制。
試驗(yàn)結(jié)果驗(yàn)證了晶鉆儀器公司MIMO振動(dòng)控制系統(tǒng)的有效性和可靠性。
The post MIMO振動(dòng)系統(tǒng)抑制控制(Control Null)功能 appeared first on 杭州銳達(dá)數(shù)字技術(shù)有限公司.
]]>The post MIMO路譜仿真測(cè)試(TWR) appeared first on 杭州銳達(dá)數(shù)字技術(shù)有限公司.
]]>目標(biāo)譜中的每個(gè)時(shí)間波形通道具有相同的采樣率和長(zhǎng)度。MIMO時(shí)間波形復(fù)制TWR進(jìn)行是基于逐塊數(shù)據(jù)的。有兩種控制算法可供選擇。一種控制算法在預(yù)測(cè)試階段測(cè)量并保持系統(tǒng)FRF矩陣,以此計(jì)算并一段一段地校正控制誤差,更新輸出信號(hào);另一種控制算法在振動(dòng)測(cè)試系統(tǒng)操作時(shí)在線更新系統(tǒng)FRF矩陣。

MIMO TWR控制特點(diǎn):
- 易用性測(cè)試流程
- 最多支持8個(gè)輸出通道
- 振動(dòng)臺(tái)可設(shè)置帶有用戶定義的驅(qū)動(dòng)自由度和振動(dòng)臺(tái)參數(shù)
- 固定FRF或?qū)崟r(shí)更新的控制策略
- 用戶可定義的H(傳遞函數(shù)矩陣)更新速率(采用實(shí)時(shí)控制策略時(shí))
- 用戶可定義的低通濾波器
- 用戶可定義升降振動(dòng)量級(jí)速率
- 運(yùn)行預(yù)測(cè)試或使用保存的FRF
- 采用統(tǒng)一或有形狀的隨機(jī)譜的預(yù)試驗(yàn),用戶定義的平均次數(shù)
- 配置文件添加/刪除/上載/下載
- 使用用戶選擇的配置文件、級(jí)別和重復(fù)時(shí)間運(yùn)行計(jì)劃
- 開(kāi)環(huán)通道、RMS中止、報(bào)警/中止、最大驅(qū)動(dòng)器等的安全檢查。
- 默認(rèn)報(bào)告,完全可自定義的報(bào)告
The post MIMO路譜仿真測(cè)試(TWR) appeared first on 杭州銳達(dá)數(shù)字技術(shù)有限公司.
]]>The post MIMO正弦測(cè)試 appeared first on 杭州銳達(dá)數(shù)字技術(shù)有限公司.
]]>MIMO正弦振動(dòng)測(cè)試系統(tǒng)里在預(yù)測(cè)試期間可以用隨機(jī)信號(hào)以識(shí)別系統(tǒng)FRF矩陣。在振動(dòng)控制期間,閉環(huán)控制將校正來(lái)自所有控制通道的誤差。跟蹤濾波器通常用于控制以及測(cè)量通道,以計(jì)算正弦信號(hào)幅度和相位。
MIMO 正弦控制特點(diǎn):
- 易用性測(cè)試流程
- 最多支持8個(gè)輸出通道
- 振動(dòng)臺(tái)配置,帶有用戶定義的驅(qū)動(dòng)自由度和振動(dòng)器
- 用戶定義的信號(hào)圖點(diǎn)數(shù)
- 用戶可定義掃描類型為對(duì)數(shù)或線性
- 用戶可定義濾波器、均方根、平均值或峰值測(cè)量策略
- 比例或固定濾波器類型
- 用戶可設(shè)置壓縮率、斜坡率和中止斜坡下降率
- 運(yùn)行預(yù)測(cè)試或使用保存的FRF
- 采用均勻或有形狀的隨機(jī)譜的預(yù)試驗(yàn),用戶指定的平均次數(shù)
- 幅值、幅值/相位的控制模式
- 配置文件庫(kù),導(dǎo)入/導(dǎo)出
- 使用用戶定義的左/右/開(kāi)始頻率、初始掃掠方向、水平、掃頻速度、掃頻編號(hào)運(yùn)行計(jì)劃
- 通道開(kāi)環(huán)、RMS中止、報(bào)警/中止、最大驅(qū)動(dòng)器等的安全檢查。
- 默認(rèn)報(bào)告,完全可自定義的報(bào)告
The post MIMO正弦測(cè)試 appeared first on 杭州銳達(dá)數(shù)字技術(shù)有限公司.
]]>The post Spider-81B振動(dòng)控制器 振動(dòng)臺(tái)控制儀 appeared first on 杭州銳達(dá)數(shù)字技術(shù)有限公司.
]]>基本的振動(dòng)測(cè)試控制系統(tǒng)
Spider-81B振動(dòng)控制器針對(duì)只需要最基本的振動(dòng)控制功能的應(yīng)用需求。它最多可以配置了4個(gè)輸入、1個(gè)輸出通道,及4個(gè)數(shù)字I/O通道。控制軟件功能包括隨機(jī)、正弦、經(jīng)典沖擊和正弦搜索駐留。
軟件功能
軟件功能包括:隨機(jī)、正弦、沖擊、 共振搜索和駐留 (RSTD)。
- 隨機(jī)振動(dòng)控制
- 正弦掃頻振動(dòng)控制
- 經(jīng)典沖擊控制
- 共振搜索和駐留 (RSTD)
黑盒模式:脫離電腦進(jìn)行振動(dòng)控制
Spider-81B振動(dòng)控制儀可以脫離PC機(jī),以黑匣子模式進(jìn)行工作。在這種模式下PC機(jī)在系統(tǒng)開(kāi)始測(cè)試前,對(duì)設(shè)備進(jìn)行配置,并將配置參數(shù)下載到設(shè)備上,Spider獨(dú)立完成測(cè)試后,再與PC聯(lián)機(jī),PC可下載測(cè)試結(jié)果數(shù)據(jù)。在測(cè)試運(yùn)行期間,控制器按預(yù)定的流程工作,并且用戶可以通過(guò)數(shù)字I/O進(jìn)行控制。
直觀的用戶界面
Spider-81振動(dòng)測(cè)試系統(tǒng)進(jìn)一步改善了用戶的界面等級(jí)。更多的圖形指導(dǎo)、向?qū)Ш凸ぞ叩募尤耄乖O(shè)置方便快捷。全新排列的接口使其更合理,更好用。“異常執(zhí)行規(guī)則”、“終止靈敏度”和其他新接口的功能,使得操作更簡(jiǎn)單。數(shù)據(jù)庫(kù)管理功能,更容易在大量的測(cè)試項(xiàng)目中通過(guò)關(guān)鍵字來(lái)進(jìn)行搜索。
Spider-81B: 廉價(jià)的, 基本振動(dòng)控制系統(tǒng)
Spider-81B 振動(dòng)控制系統(tǒng)基本模型
下載Spider-81更多產(chǎn)品信息:
The post Spider-81B振動(dòng)控制器 振動(dòng)臺(tái)控制儀 appeared first on 杭州銳達(dá)數(shù)字技術(shù)有限公司.
]]>The post 振動(dòng)控制器 振動(dòng)控制儀 振動(dòng)臺(tái)控制儀 振動(dòng)測(cè)試控制器 Spider-81 appeared first on 杭州銳達(dá)數(shù)字技術(shù)有限公司.
]]>SPIDER-81 振動(dòng)控制系統(tǒng) 振動(dòng)控制儀 振動(dòng)臺(tái)控制儀
以DSP 為核心的結(jié)構(gòu)
與傳統(tǒng)控制器過(guò)重依賴于外部計(jì)算機(jī)進(jìn)行實(shí)時(shí)操作不同,Spider 振動(dòng)臺(tái)控制儀是第一個(gè)將時(shí)間同步以太網(wǎng)連接與嵌入式DSP直接集成在一起的控制器。這一策略極大地增強(qiáng)了控制性能、系統(tǒng)可靠性和異常保護(hù)能力,使得系統(tǒng)可以配置極大的通道數(shù)卻不影響系統(tǒng)性能。
最新的硬件設(shè)計(jì)
Spider81振動(dòng)控制器模塊裝備有電壓、電荷和IEPE輸入通道,可適用于沖擊、振動(dòng)和聲學(xué)測(cè)試及其它通用的電壓信號(hào)測(cè)量。其內(nèi)部閃存可以同時(shí)儲(chǔ)存數(shù)百個(gè)通道的測(cè)試配置數(shù)據(jù)和實(shí)時(shí)分析數(shù)據(jù)。多個(gè)輸出通道提供了各種與輸入采樣頻率同步的信號(hào)波形。配備了一個(gè)能夠顯示測(cè)試狀態(tài)信息的液晶顯示屏。每臺(tái)設(shè)備提供10個(gè)監(jiān)測(cè)連接來(lái)讀取模擬輸入和輸出信號(hào),前面板上還有多個(gè)操作按鍵。通過(guò)內(nèi)置的獨(dú)立數(shù)字I/O和RS485串行端口可以連接到其他硬件。有一個(gè)緊急終止按鈕可以在危急情況下中斷測(cè)試
網(wǎng)絡(luò)連接方便
以太網(wǎng)連接方式使得Spider-81振動(dòng)控制儀在物理距離上可以與PC機(jī)離開(kāi)較遠(yuǎn),這種分布式的結(jié)構(gòu)方式大大減少了噪聲和系統(tǒng)中的電子干擾。通過(guò)網(wǎng)絡(luò)一臺(tái)PC機(jī)可以監(jiān)視和控制多臺(tái)控制器。由于控制過(guò)程和數(shù)據(jù)記錄都在控制器內(nèi)部執(zhí)行,網(wǎng)絡(luò)連接方式并不會(huì)影響控制性能。通過(guò)無(wú)線網(wǎng)絡(luò)路由器,PC還可以方便地采用WiFi方式連接遠(yuǎn)程的Spider設(shè)備。
多模塊時(shí)間同步技術(shù)
Spider81振動(dòng)測(cè)試系統(tǒng)采用了IEEE1588時(shí)間同步技術(shù),在同一個(gè)局域網(wǎng)上的Spider模塊可以達(dá)到100ns的時(shí)間同步精度,即可以保證20KHz分析頻寬下,通道間相位誤差不大于±1度。采用這一技術(shù)和高速以太網(wǎng)使得分布于網(wǎng)絡(luò)上的模塊,可以象一臺(tái)集中式設(shè)備一樣進(jìn)行操作。
軟件功能

spider-81振動(dòng)控制儀,八通道模塊,可擴(kuò)展的高通道數(shù)振動(dòng)控制系統(tǒng)

Spider-81 振動(dòng)控制儀, 背面圖.
The post 振動(dòng)控制器 振動(dòng)控制儀 振動(dòng)臺(tái)控制儀 振動(dòng)測(cè)試控制器 Spider-81 appeared first on 杭州銳達(dá)數(shù)字技術(shù)有限公司.
]]>The post Spider-80X 多通道數(shù)動(dòng)態(tài)測(cè)量系統(tǒng)、動(dòng)態(tài)信號(hào)分析系統(tǒng)與振動(dòng)控制系統(tǒng) appeared first on 杭州銳達(dá)數(shù)字技術(shù)有限公司.
]]>Spider-80X 多通道數(shù)動(dòng)態(tài)測(cè)量系統(tǒng)、動(dòng)態(tài)信號(hào)分析系統(tǒng)和振動(dòng)控制系統(tǒng)
可伸縮變化的動(dòng)態(tài)測(cè)量系統(tǒng)
Spider-80X是一個(gè)結(jié)構(gòu)上高度模塊化、真正分布式和可伸縮變化的動(dòng)態(tài)測(cè)量系統(tǒng)。它是需要方便、快捷和精確的數(shù)據(jù)記錄、實(shí)時(shí)信號(hào)分析和振動(dòng)控制等應(yīng)用領(lǐng)域的理想設(shè)備,可廣泛應(yīng)用于機(jī)械狀態(tài)監(jiān)測(cè)、汽車、民用飛行器、工業(yè)制造、大學(xué)研究教育、電子領(lǐng)域。
多個(gè)Spider-80X模塊可以組成一個(gè)多通道測(cè)量系統(tǒng),根據(jù)不同的機(jī)箱組成16通道動(dòng)態(tài)信號(hào)分析系統(tǒng) 、32通道數(shù)據(jù)采集系統(tǒng)、64通道振動(dòng)控制系統(tǒng)。多個(gè)機(jī)箱在因特網(wǎng)中通過(guò)Spider-Hub組成更高輸入通道的Spider系統(tǒng),所有通道可以同步采樣。多個(gè)Spider模塊可以通過(guò)IEEE1588協(xié)議進(jìn)行精確的時(shí)間同步,從而所有通道在頻域上可以獲得完美的相位匹配特性。這些通道可以位于同一個(gè)或不同的模塊上。
高動(dòng)態(tài)測(cè)量范圍
Spider的性能在同行業(yè)的高動(dòng)態(tài)測(cè)量范圍的產(chǎn)品中位于前列,擁有專利,160dB的輸入通道測(cè)量范圍(在時(shí)域中定義)。每個(gè)測(cè)量通道檢測(cè)小至6μV和大至±20 V這種高動(dòng)態(tài)范圍技術(shù)使得Spider80X不需要象傳統(tǒng)數(shù)據(jù)采集設(shè)備那樣設(shè)置輸入量程/放大系數(shù)。
Spider80X采用高速浮點(diǎn)DSP處理器管理數(shù)據(jù)輸入/輸出,并進(jìn)行實(shí)時(shí)處理,同時(shí)配置了大容量的RAM和板上閃存用于海量數(shù)據(jù)存儲(chǔ)。特別的散熱和低功耗設(shè)計(jì)使得不需要冷卻風(fēng)扇,從而降低了能耗并消除了噪聲。
多通道振動(dòng)測(cè)試控制
Spider81模塊裝備有電壓和IEPE輸入通道,可適用于沖擊、振動(dòng)和聲學(xué)測(cè)試及其它通用的電壓信號(hào)測(cè)量。Spider-80X振動(dòng)控制器每個(gè)模塊有8個(gè)輸入通道,每個(gè)通道都可以準(zhǔn)確地測(cè)量記錄動(dòng)態(tài)和靜態(tài)信號(hào)。實(shí)時(shí)計(jì)算時(shí)域和頻域的同時(shí)8個(gè)通道可以以最高采樣102.4 kHz把時(shí)域數(shù)據(jù)記錄于它的內(nèi)部閃存。內(nèi)置的信號(hào)源以輸入的采樣率提供提供不同的信號(hào)通道輸出波形。
振動(dòng)試驗(yàn)控制–運(yùn)行模式
spider-80x振動(dòng)試驗(yàn)由主機(jī)或黑盒模式控制,預(yù)先設(shè)定好實(shí)驗(yàn)條件下載到設(shè)備中手動(dòng)啟動(dòng)或基于事件觸發(fā)。任何振動(dòng)控制試驗(yàn)以黑盒模式或網(wǎng)絡(luò)分布式系統(tǒng)運(yùn)行,用戶能夠?qū)⒛K無(wú)限靠近測(cè)量對(duì)象。
完美的振動(dòng)控制軟件
spider-80x擁有完美的振動(dòng)控制軟件。EDM(工程數(shù)據(jù)管理)是晶鉆儀器針對(duì)振動(dòng)控制需求開(kāi)發(fā)的直觀的界面。spider-80x也可以和ipad app應(yīng)用程序版本兼容。
動(dòng)態(tài)信號(hào)分析功能
◎數(shù)學(xué)運(yùn)算(+、-、*、/)、積分/微分、RMS、峰值、平均、概率統(tǒng)計(jì)。
◎加窗、FFT、ZoomFFT、自功譜/互功譜、頻率響應(yīng)FRF,相干、自相關(guān)。
◎?qū)崟r(shí)濾波器:抽點(diǎn)、IIR、FIR、FIR-Remez、FIR-Window
◎倍頻程分析和聲級(jí)計(jì) (SLM)、階次跟蹤、閾值報(bào)警、沖擊響應(yīng)譜、時(shí)間波形復(fù)制等
振動(dòng)控制功能
- 正弦掃頻振動(dòng)控制
- 共振搜索和駐留 (RSTD)
- 正弦振蕩
- 正弦+隨機(jī) (SoR)
- 隨機(jī)+隨機(jī) (RoR)
- 經(jīng)典沖擊
- 瞬態(tài)時(shí)間歷史信號(hào)(TTH)
- 沖擊響應(yīng)譜(SRS)合成和控制
- 時(shí)間波形復(fù)制(TWR)
- 高加速壽命試驗(yàn) (HALT/HASS)
- 多通道數(shù)控制

Spider-80X動(dòng)態(tài)測(cè)量系統(tǒng),配置在一個(gè)64位機(jī)架上,它是一個(gè)可伸縮變化的高通道系統(tǒng)。
單個(gè) Spider-80X 動(dòng)態(tài)信號(hào)分析儀與振動(dòng)控制器模塊前端與背面
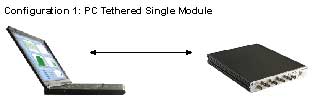
一個(gè)Spider-80X模塊可直接或通過(guò)以太網(wǎng)連接到PC電腦。不需要開(kāi)關(guān)。PC通過(guò)EDM軟件控制和監(jiān)控終端。
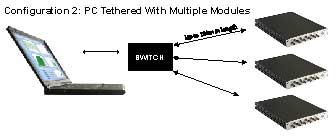
多個(gè)Spider模塊連接組成一個(gè)高通道數(shù)系統(tǒng)。多個(gè)交換機(jī)將機(jī)架鏈接組成更高的通道數(shù)。PC通過(guò)EDM軟件控制和監(jiān)控終端。

除配置1外,都不需要在電腦中配置。PC被要求安裝Spider黑盒模式,它使得Spider模塊不需要電腦操作也能實(shí)時(shí)運(yùn)行。PC只在配置Spider和下載數(shù)據(jù)時(shí)運(yùn)行。
The post Spider-80X 多通道數(shù)動(dòng)態(tài)測(cè)量系統(tǒng)、動(dòng)態(tài)信號(hào)分析系統(tǒng)與振動(dòng)控制系統(tǒng) appeared first on 杭州銳達(dá)數(shù)字技術(shù)有限公司.
]]>The post Spider-80Xi便攜式多通道數(shù)據(jù)采集系統(tǒng)與64通道數(shù)據(jù)采集儀 appeared first on 杭州銳達(dá)數(shù)字技術(shù)有限公司.
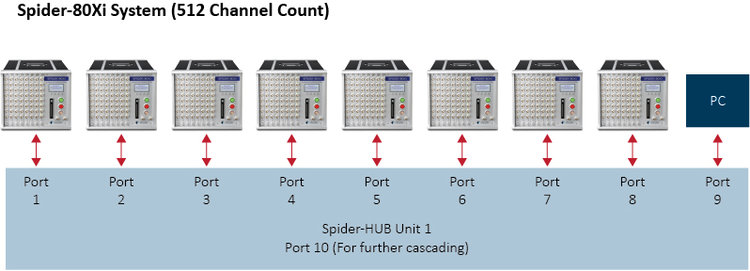
]]>SPIDER-80Xi 多通道數(shù)據(jù)采集系統(tǒng)和64通道數(shù)據(jù)采集儀
Spider-80Xi前端

可擴(kuò)展的動(dòng)態(tài)測(cè)量系統(tǒng)
Spider-80Xi多通道數(shù)據(jù)采集系統(tǒng),它同Spider-80X一樣,可組合多個(gè)Spider模塊。當(dāng)前有兩種不同的機(jī)架,一種可連接64個(gè)輸入通道(64通道數(shù)據(jù)采集儀),另一個(gè)連接32個(gè)輸入通道(32通道數(shù)據(jù)采集儀)。一個(gè)Spider系統(tǒng)可以擴(kuò)展至512個(gè)通道,所有通道同時(shí)采樣。專用大容量存儲(chǔ)硬盤(250GB以上固態(tài)硬盤)可實(shí)時(shí)記錄所有輸入通道的時(shí)間信號(hào)。精確的時(shí)間同步,使所有的通道在頻域上可以獲得完美的相位匹配特性。無(wú)論是否在同一個(gè)Spider前端,實(shí)時(shí)FFT、倍頻程、階次跟蹤或者振動(dòng)控制函數(shù)等功能都是可用的。
便攜性配置
Spider-80Xi是一個(gè)輕巧、緊湊型高通道數(shù)據(jù)采集系統(tǒng)和動(dòng)態(tài)信號(hào)分析系統(tǒng),設(shè)有64個(gè)通道,機(jī)架重量小于10.5Kg,它便于攜帶,非常適合現(xiàn)場(chǎng)測(cè)試。
Spider80Xi是Spider-80X的精簡(jiǎn)版,它的設(shè)計(jì)去除了機(jī)架內(nèi)每個(gè)模塊卡的外殼。Spider-80Xi的模塊卡被固定在一個(gè)機(jī)架中,不支持熱插拔操作。重量和尺寸都得到了進(jìn)一步精簡(jiǎn),單手便可攜帶。
高動(dòng)態(tài)測(cè)量范圍
Spider的性能在同行業(yè)的高通道動(dòng)態(tài)測(cè)量系統(tǒng)產(chǎn)品中位于前列,擁有專利,160dB的輸入通道測(cè)量范圍(在時(shí)域中定義)。每個(gè)測(cè)量通道檢測(cè)小至6μV和大至±20 V這種高動(dòng)態(tài)范圍技術(shù)使得Spider-80Xi不需要象傳統(tǒng)數(shù)據(jù)采集設(shè)備那樣設(shè)置輸入量程/放大系數(shù)。
動(dòng)態(tài)測(cè)量功能
Spider-80Xi執(zhí)行許多動(dòng)態(tài)信號(hào)分析功能,包括數(shù)據(jù)記錄,(+,-,*,/)等算數(shù)運(yùn)算,積分,微分,加窗函數(shù),F(xiàn)FT譜,平均值,功率譜,互譜,傳遞函數(shù)FRF,相干分析,實(shí)時(shí)過(guò)濾,RMS,正弦掃頻,極限值,警報(bào)/終止等。
黑盒工作模式
Spider-80Xi能使用黑盒模式,它容許脫離PC進(jìn)行數(shù)據(jù)采集操作。在這個(gè)模式下,PC電腦只用于測(cè)試前配置系統(tǒng),然后在測(cè)試完成后下載數(shù)據(jù)。測(cè)試期間,前端可按照預(yù)先設(shè)定的時(shí)間表或各種外部設(shè)備如使用Wi-FI的PDA或IPad操作。
實(shí)時(shí)信號(hào)分析功能
◎數(shù)學(xué)運(yùn)算(+、-、*、/)、積分/微分、RMS、峰值、平均、概率統(tǒng)計(jì)。
◎加窗、FFT、ZoomFFT、自功譜/互功譜、頻率響應(yīng)FRF,相干、自相關(guān)。
◎?qū)崟r(shí)濾波器:抽點(diǎn)、IIR、FIR、FIR-Remez、FIR-Window
◎倍頻程分析、階次跟蹤、閾值報(bào)警等
◎單雙面動(dòng)平衡
振動(dòng)控制功能
隨機(jī)、正弦、經(jīng)典沖擊、正弦+隨機(jī)、隨機(jī)+隨機(jī)、正弦+隨機(jī)+隨機(jī)、共振搜索與駐留、瞬態(tài)沖擊、沖擊響應(yīng)譜、路譜仿真等


Spider-80Xi動(dòng)態(tài)信號(hào)分析系統(tǒng)64通道數(shù)前端配置

Spider-80Xi動(dòng)態(tài)信號(hào)分析系統(tǒng)背面配置

Spider-80Xi動(dòng)態(tài)信號(hào)分析系統(tǒng)32通道數(shù)前端配置
下載更多Spider信息:
Spider-80X&Spider-80Xi多通道測(cè)量手冊(cè)
Spider-80X&Spider-80Xi多通道測(cè)量手冊(cè)(中文)
美國(guó)晶鉆儀器振動(dòng)控制與數(shù)據(jù)采集解決方案手冊(cè)(中文)
The post Spider-80Xi便攜式多通道數(shù)據(jù)采集系統(tǒng)與64通道數(shù)據(jù)采集儀 appeared first on 杭州銳達(dá)數(shù)字技術(shù)有限公司.
]]>The post 晶鉆儀器推出新款Spider-81 和Spider-81B 振動(dòng)臺(tái)控制儀 appeared first on 杭州銳達(dá)數(shù)字技術(shù)有限公司.
]]>
2018年7月,美國(guó)晶鉆儀器公司(Crystal Instruments)宣布推出新款Spider-81和Spider-81B振動(dòng)控制儀。 八年前,晶鉆儀器推出首款第四代振動(dòng)控制器 Spider-81和Spider-81B。通過(guò)過(guò)去幾年的不斷修訂,該系列產(chǎn)品已經(jīng)改進(jìn)并發(fā)展成為市場(chǎng)上著名品牌之一。本次新款的推出,標(biāo)志晶鉆公司在產(chǎn)品硬件設(shè)計(jì)方面的一個(gè)新的里程碑。
新款的Spider-81 和 Spider-81B振動(dòng)臺(tái)控制儀, 其軟件上和以前版本完全兼容,但硬件方面從里到外都有大幅改進(jìn),產(chǎn)品配置了新設(shè)計(jì)的更加美觀和堅(jiān)固的外殼,滿足在可靠性和包裝方面的更嚴(yán)苛的需求。電路設(shè)計(jì)方面保留現(xiàn)有的數(shù)字信號(hào)處理強(qiáng)大功能,依然使用DSP集中式架構(gòu),輸入通道則可級(jí)聯(lián)擴(kuò)展至512通道同時(shí)高速采樣,每個(gè)模塊使用網(wǎng)絡(luò)實(shí)時(shí)同步,主模塊上可以使用最多4個(gè)輸出,每個(gè)模塊具有4GB的內(nèi)部存儲(chǔ)空間,使用LCD顯示屏,測(cè)量方面繼續(xù)保持高可靠性和準(zhǔn)確性。

?新款 Spider-81B 振動(dòng)臺(tái)控制儀 正面與背面圖
新款Spider系列將雙AD技術(shù)專利與改進(jìn)的硬件結(jié)合,將動(dòng)態(tài)測(cè)量范圍擴(kuò)展至160dB。本底噪音的得到進(jìn)一步降低。晶鉆公司在獲得雙AD技術(shù)專利后,因其超高的動(dòng)態(tài)范圍,在CoCo和Spider硬件平臺(tái)方面獲得巨大的成功。
新款硬件在輸入通道的保護(hù)方面做了更多的改進(jìn),以往舊版的30伏特保護(hù)電壓被增加到220伏特,這個(gè)改進(jìn)使得在現(xiàn)場(chǎng)的設(shè)備能夠應(yīng)對(duì)更復(fù)雜的強(qiáng)電干擾,增加產(chǎn)品的可靠性。

?新款 Spider-81 振動(dòng)控制器 正面與背面
眾所周知,在復(fù)雜大型振動(dòng)測(cè)試環(huán)境里,周圍有種種強(qiáng)電和弱電造成的電磁輻射和電纜干擾,而接地和工頻干擾一直是振動(dòng)控制精度受到影響的主要根源之一,新款硬件在設(shè)計(jì)過(guò)程中更注意接地和供電干擾的優(yōu)化,使得測(cè)試效果更好。
新款Spider-81系列將高性能和高品質(zhì)結(jié)合,提供更高標(biāo)準(zhǔn)的振動(dòng)控制。背面的縮進(jìn)設(shè)計(jì)可有效保護(hù)BNC連接器。我們也非常高興為該系列產(chǎn)品提供更時(shí)尚、更優(yōu)雅的現(xiàn)代風(fēng)格外觀。
如果您希望獲得更多關(guān)于振動(dòng)控制器與振動(dòng)控制系統(tǒng)方面詳情,請(qǐng)聯(lián)系我們。
晶鉆儀器(CI)相關(guān)產(chǎn)品推薦:
SPIDER-81 振動(dòng)控制系統(tǒng) 振動(dòng)控制儀 振動(dòng)臺(tái)控制儀
Spider-81B 經(jīng)濟(jì)型振動(dòng)控制器 振動(dòng)臺(tái)控制儀
The post 晶鉆儀器推出新款Spider-81 和Spider-81B 振動(dòng)臺(tái)控制儀 appeared first on 杭州銳達(dá)數(shù)字技術(shù)有限公司.
]]>The post MIMO隨機(jī)測(cè)試 appeared first on 杭州銳達(dá)數(shù)字技術(shù)有限公司.
]]>對(duì)于MIMO隨機(jī)振動(dòng)控制系統(tǒng)為每個(gè)控制通道定義不同的隨機(jī)目標(biāo)譜。這些控制之間的關(guān)系可以定義和控制,模式:幅度控制、Mag和相位控制以及高級(jí)控制。
MIMO隨機(jī)控制特點(diǎn):
- 易用性測(cè)試流程
- 最多支持8個(gè)輸出通道
- 振動(dòng)臺(tái)配置,帶有用戶可定義的驅(qū)動(dòng)自由度和振動(dòng)臺(tái)
- 用戶定義的H更新速率
- 校正誤差的非線性控制
- 用戶選擇的上升/下降速率
- 運(yùn)行預(yù)測(cè)試或使用保存的FRF
- 采用均勻或有形狀的隨機(jī)譜的預(yù)試驗(yàn),用戶指定的平均次數(shù)
- 幅度、mag和相位或高級(jí)控制模式
- 配置文件庫(kù),導(dǎo)入/導(dǎo)出
- 使用用戶定義的級(jí)別/持續(xù)時(shí)間、循環(huán)運(yùn)行計(jì)劃
- 開(kāi)環(huán)通道、RMS中止、報(bào)警/中止、最大驅(qū)動(dòng)器等的安全檢查。
- 默認(rèn)報(bào)告,完全可自定義的報(bào)告
The post MIMO隨機(jī)測(cè)試 appeared first on 杭州銳達(dá)數(shù)字技術(shù)有限公司.
]]>