The post 使用EDM Modal軟件對加工設(shè)備進行模態(tài)分析 appeared first on 杭州銳達數(shù)字技術(shù)有限公司.
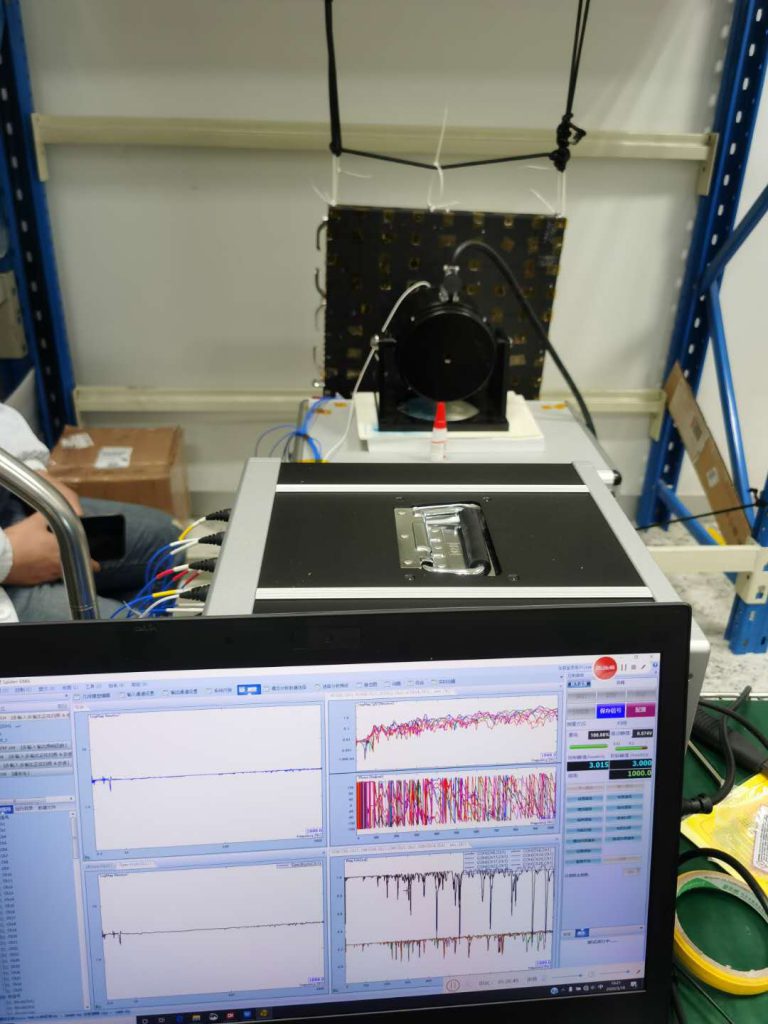
]]>本文描述了對加工設(shè)備進行實驗模態(tài)分析獲得模態(tài)特征的案例。使用兩個三軸加速度計進行了錘擊試驗,研究了試驗裝置的模態(tài)特性。巡回響應法獲得FRF矩陣的一列。由于加工設(shè)備較大,選用大力錘以提供足夠的激勵。使用EDM?Modal軟件的錘擊法測試模塊執(zhí)行該試驗。
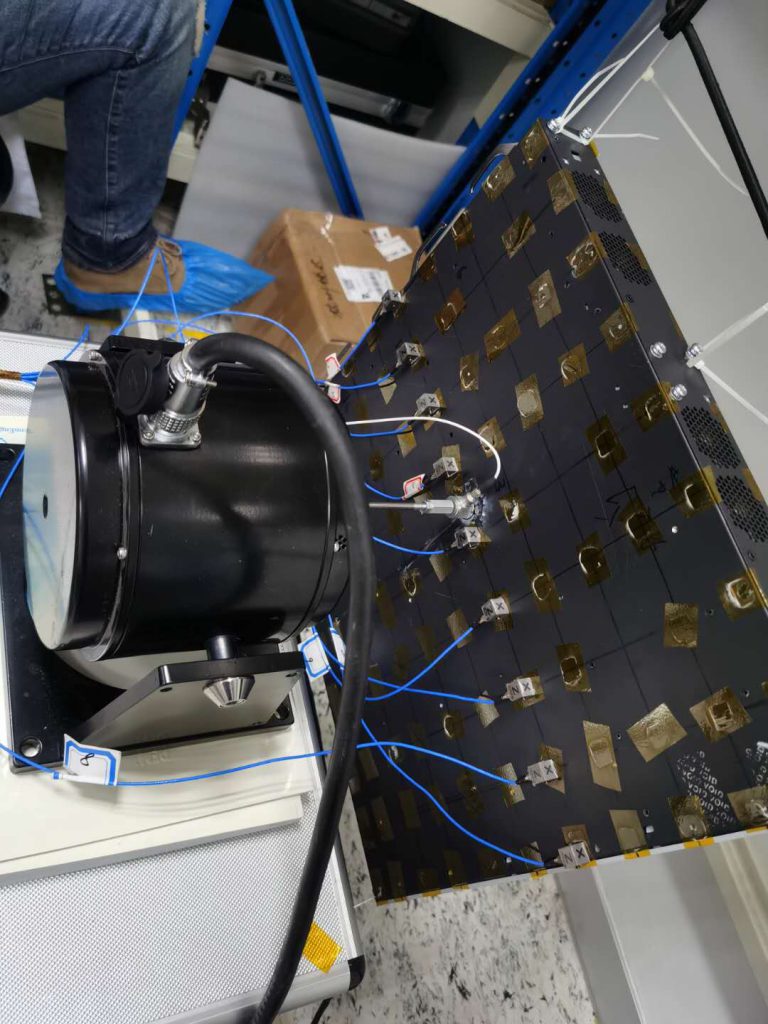
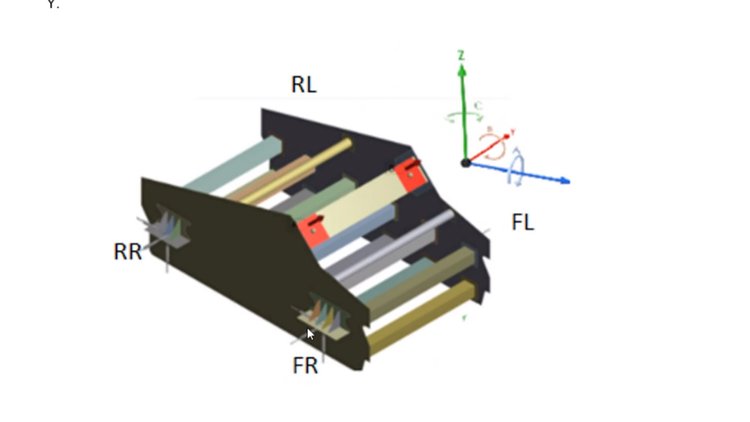 圖1 ?加工設(shè)備的錘擊法模態(tài)實驗
圖1 ?加工設(shè)備的錘擊法模態(tài)實驗
將加工設(shè)備的三維幾何模型粗糙地劃分成28個節(jié)點均勻分布的網(wǎng)格。將加工設(shè)備安裝在其工作條件下進行模態(tài)實驗。三軸加速度計巡回通過不同的測點,大力錘在一個固定的參考點激勵結(jié)構(gòu)。測量X、Y、Z三個方向的激振力和響應加速度,分析獲得三維模態(tài)振型。
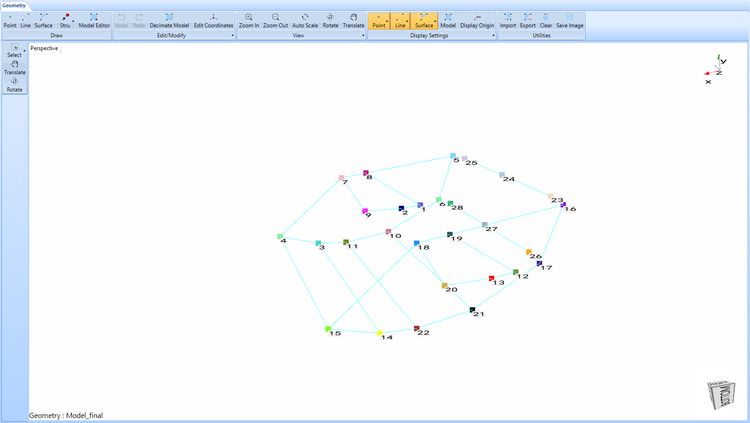 圖2 加工設(shè)備三維幾何模型
圖2 加工設(shè)備三維幾何模型
由于結(jié)構(gòu)的固有頻率較低,因此采樣率設(shè)置為200Hz,塊大小設(shè)置為4096,以確保響應自然衰減,不需要施加窗函數(shù)。使用這種設(shè)置,可以獲得精細到0.05Hz的頻率分辨率。每個測量自由度上對3幀數(shù)據(jù)進行線性平均,可以獲得更高精度和降噪后的測量結(jié)果。
錘擊激勵能夠激發(fā)100Hz頻率范圍內(nèi)的響應。采用這種設(shè)置,就不會產(chǎn)生頻譜泄漏,可以選擇一個均勻窗。
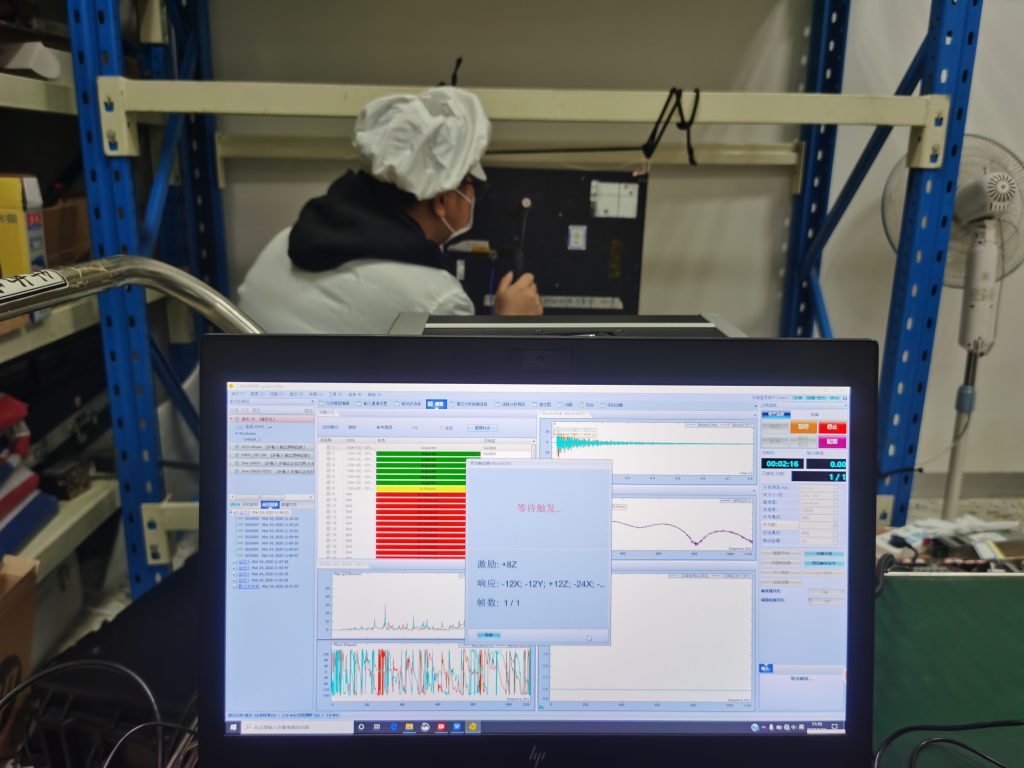
 圖3 ?加工設(shè)備錘擊法測量
圖3 ?加工設(shè)備錘擊法測量
頻響測量顯示在分析頻率范圍內(nèi)的共振峰。頻響重疊表明峰值排列良好。由于傳感器體積小,重量明顯小于加工設(shè)備,因此質(zhì)量附加效應極小。
圖4 模態(tài)數(shù)據(jù)選擇選項卡顯示重疊的頻響
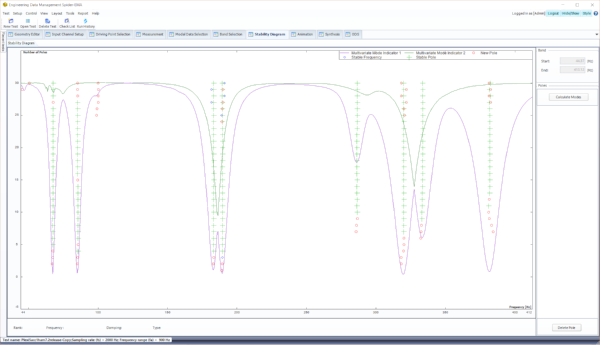
采用Poly-X法對頻響函數(shù)進行曲線擬合,得到如下穩(wěn)定性圖。在所需的頻率范圍內(nèi)選擇柔性模態(tài)。多變量模態(tài)指示函數(shù)(MMIF)用于指示固有頻率上的谷值。
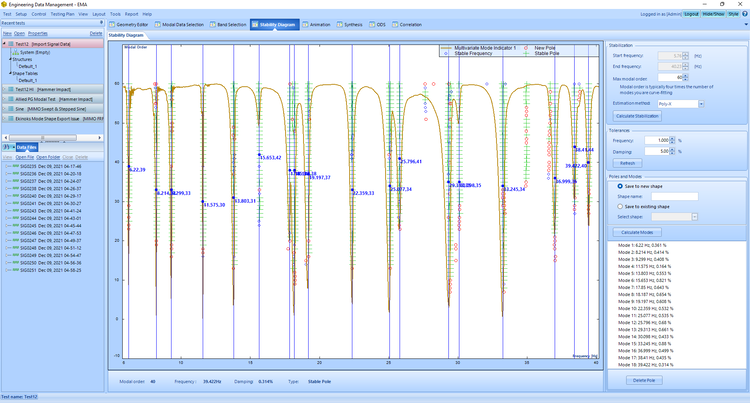 圖5 柔性模態(tài)的穩(wěn)態(tài)圖
圖5 柔性模態(tài)的穩(wěn)態(tài)圖
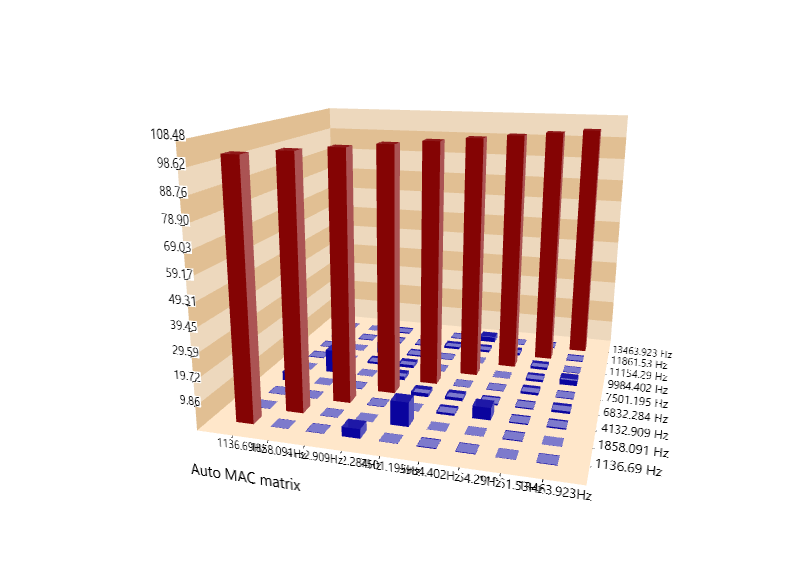
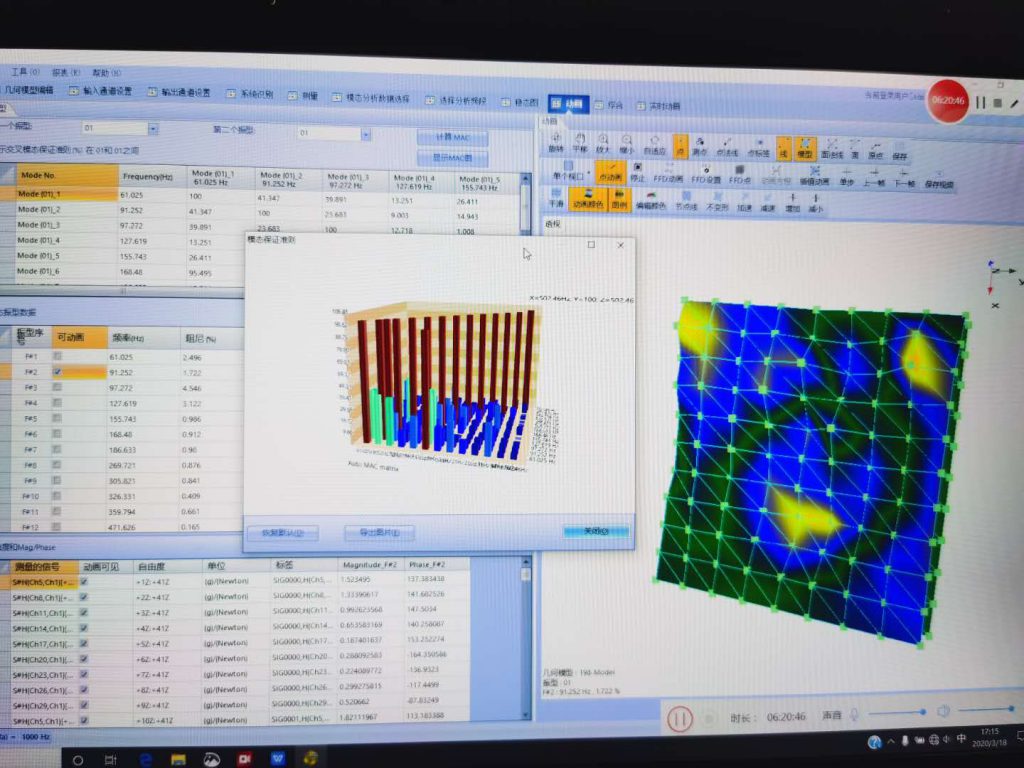
Auto-MAC矩陣幫助用戶驗證結(jié)果。下面的Auto-MAC矩陣表明,振型之間是正交的(低非對角元素),并且是唯一的(高對角元素)。一些非對角元素偏高,表明該結(jié)構(gòu)模態(tài)試驗的空間分辨率較低。采用更多的測點進行模態(tài)測試,可以得到更好的MAC矩陣。
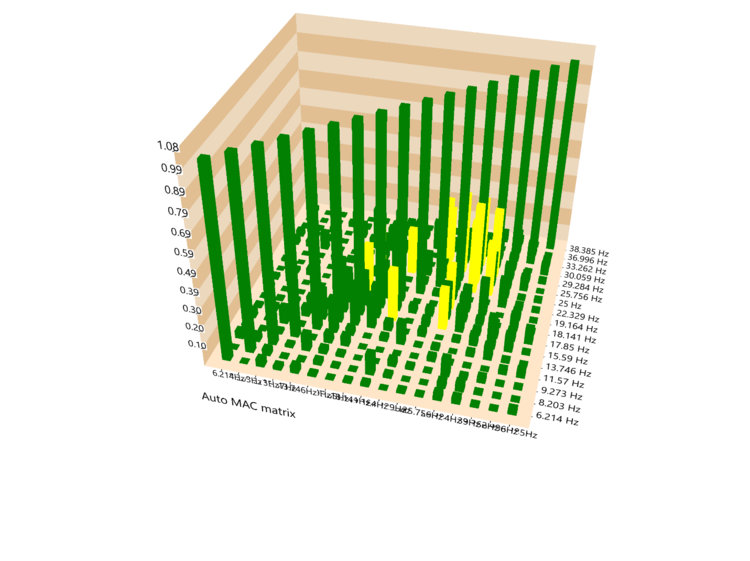 圖6 加工設(shè)備錘擊法模態(tài)試驗 Auto-MAC圖
圖6 加工設(shè)備錘擊法模態(tài)試驗 Auto-MAC圖
下圖顯示了與穩(wěn)定物理極點相關(guān)的一些振型的動畫。
 圖7 加工設(shè)備柔性模態(tài)振型
圖7 加工設(shè)備柔性模態(tài)振型
結(jié)果表明,晶鉆儀器公司的EDM模態(tài)軟件能夠有效地應用在大型復雜結(jié)構(gòu)的復雜模態(tài)試驗上。
The post 使用EDM Modal軟件對加工設(shè)備進行模態(tài)分析 appeared first on 杭州銳達數(shù)字技術(shù)有限公司.
]]>The post 使用EDM Modal軟件對機器人進行模態(tài)分析 appeared first on 杭州銳達數(shù)字技術(shù)有限公司.
]]>機器人大擂臺
終結(jié)者、機械戰(zhàn)警、機械威龍以及機動戰(zhàn)士高達(霧)等系列影視作品在1980~1990年代初的熱播,“機器人戰(zhàn)斗”這一概念在民眾中初步建立,并引發(fā)討論的熱情。1992年,腦洞大開的工程師Marc Thorpe在設(shè)計遙控真空吸塵器的失敗過程中,萌生了“以現(xiàn)有科技水平制作格斗機器人舉辦格斗大會”的念頭。在數(shù)次失敗的嘗試后,1994年初Marc最終成功吸引了資本的注意,在三蕃市舉辦了第一屆Robot Wars,并于媒體投放大量廣告,利用“機器人”熱潮吸引觀眾。
可惜的是,被雜志、報紙上大量經(jīng)Photoshop加工的海報吸引而至、不明真相的群眾卻感受到了深深的欺騙。。。
宣傳的時候是這樣的
 這樣的
這樣的
 甚至這樣的
甚至這樣的
 觀眾的期待是這樣的
觀眾的期待是這樣的
這樣的
 甚至這樣的
甚至這樣的

可現(xiàn)實中的參賽選手是,這樣的
 這樣的
這樣的
 以及這樣的
以及這樣的
 。。。。。。。。。。
。。。。。。。。。。
機器人的攻擊手段基本是這樣的
 戰(zhàn)斗場景基本是這樣的
戰(zhàn)斗場景基本是這樣的
 。。。。。。。。。。。
。。。。。。。。。。。

好在,第一屆比賽的舉辦起到了足夠的宣傳作用,盡管比賽本身不如人們期待般激烈精彩,但這一點同樣激起了很多觀眾參與其中的欲望。“哎呀媽呀,這樣的也能上啊?那我也能上。”。于是乎,《機器人大擂臺》這個比賽節(jié)目就一屆一屆的舉辦下去,直到現(xiàn)在。
以上內(nèi)容來自知乎,如果侵犯您的版權(quán),。。。。
調(diào)侃完畢,下面進入今日主題《對戰(zhàn)斗機器人的模態(tài)分析》。
對機器人的模態(tài)分析


圖0 戰(zhàn)斗機器人ICEWAVE battlebot
在機器人競賽中,獲勝者試圖通過造成傷害或破壞關(guān)鍵部件來摧毀對手。在設(shè)計研發(fā)過程中,工程師通過模態(tài)試驗獲得機器人的固有頻率、阻尼和模態(tài)振型,幫助識別結(jié)構(gòu)中的薄弱環(huán)節(jié)。因此,模態(tài)分析獲得機器人的模態(tài)參數(shù),對機器人的設(shè)計和性能優(yōu)化具有重要意義。
錘擊法模態(tài)試驗,采用力錘和單軸加速度傳感器。由力錘激勵的脈沖具有很寬的頻率范圍。為避免巡回響應法產(chǎn)生的質(zhì)量附加效應,采用巡回激勵法進行模態(tài)試驗。
使用Spider-80X硬件和最新版EDM 10.0 模態(tài)軟件進行錘擊法模態(tài)試驗。
 圖1 機器人模態(tài)錘擊試驗
圖1 機器人模態(tài)錘擊試驗
將槳葉模型劃分成30個節(jié)點均勻分布的網(wǎng)格,以獲得良好的模態(tài)振型空間分辨率。使用彈性繩懸掛機器人,模擬自由-自由邊界條件(如上圖所示)。用金屬錘頭的力巡回敲擊每個測量點,使用粘貼在測點上的單軸加速度傳感器捕捉?jīng)_擊激勵的響應。測量垂直槳葉方向上的激勵和響應有助于獲得面外模態(tài)振型。
 圖2 機器人幾何模型
圖2 機器人幾何模型
我們對機器人結(jié)構(gòu)3.5kHz頻率范圍內(nèi)的模態(tài)感興趣,因此設(shè)置采樣率為8kHz,塊大小為8192,從而得到0.9765Hz的精細頻率分辨率。每個測量自由度上對3幀數(shù)據(jù)進行線性平均,可以獲得更高精度和降噪后的測量結(jié)果。
使用金屬錘頭的力錘容易激發(fā)3.5kHz頻率范圍的脈沖。使用較大的塊大小能確保響應自然衰減,而無需引入力-指數(shù)窗函數(shù)。這種塊大小的另一個優(yōu)勢是可以獲得更精細的頻率分辨率。通過這些設(shè)置,不會產(chǎn)生頻譜泄露,可以使用均勻窗函數(shù)。
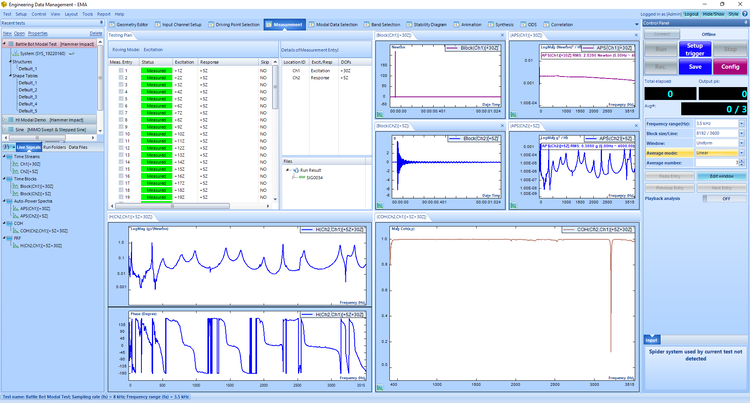 圖3 機器人錘擊激勵測量
圖3 機器人錘擊激勵測量
相干圖可用于驗證測量結(jié)果,從上圖的相干圖可以看出測量結(jié)果不錯。相干圖的谷值出現(xiàn)在反共振頻率處,說明在對應頻率處的響應水平相對較低。總體來說,輸入和輸出在分析頻率范圍內(nèi)是相關(guān)的。
從模態(tài)數(shù)據(jù)選擇選項卡中可以看到,測量頻響信號的激勵和響應自由度可以相互自由切換。
頻響曲線顯示在3.5kHz分析頻率范圍內(nèi)有良好的峰。將30個實測頻響疊加,可以識別出幾階模態(tài)振型。峰重疊良好說明測量結(jié)果較好,沒有產(chǎn)生質(zhì)量附加效應。
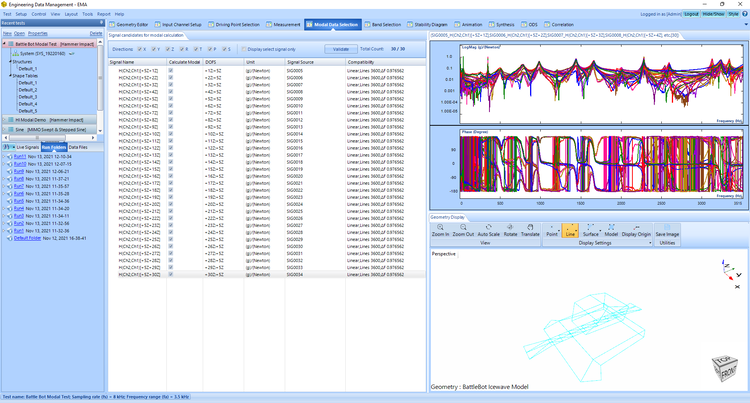 圖4 模態(tài)數(shù)據(jù)選項卡顯示疊加后FRF的幅值和相位
圖4 模態(tài)數(shù)據(jù)選項卡顯示疊加后FRF的幅值和相位
復模態(tài)指示函數(shù)(CMIF)用于指示分析頻率范圍內(nèi)的模態(tài)。此外,還可以通過求和頻響函數(shù)來識別模態(tài)。采用新的Poly-X算法對頻響函數(shù)進行曲線擬合,得到如下穩(wěn)定性圖。在所需的頻率范圍內(nèi)選擇六階柔性模態(tài)。
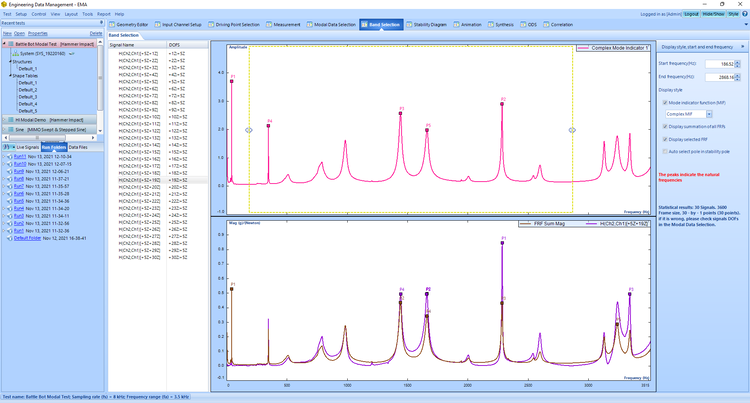 圖5 在分析頻率范圍內(nèi)通過模態(tài)指示函數(shù)定位和識別模態(tài)
圖5 在分析頻率范圍內(nèi)通過模態(tài)指示函數(shù)定位和識別模態(tài)
選取穩(wěn)態(tài)極點,得到感興趣模態(tài)的固有頻率和阻尼比。通過殘差計算獲得與每階模態(tài)相關(guān)聯(lián)的模態(tài)振型。
 圖 6 40 Hz 時機器人的一階彎曲模態(tài)
圖 6 40 Hz 時機器人的一階彎曲模態(tài)
 圖 7 345 Hz 時機器人的一階扭轉(zhuǎn)模態(tài)
圖 7 345 Hz 時機器人的一階扭轉(zhuǎn)模態(tài)
 圖 8 509 Hz 時機器人的高階彎曲模態(tài)
圖 8 509 Hz 時機器人的高階彎曲模態(tài)
 圖9 2004Hz時機器人的彎曲和扭轉(zhuǎn)模態(tài)綜合
圖9 2004Hz時機器人的彎曲和扭轉(zhuǎn)模態(tài)綜合
通過快速掃描測量頻響數(shù)據(jù)集,可以將機器人在每個頻率的變形可視化。通過這些頻譜數(shù)據(jù),我們知道各階模態(tài)是解耦的,因此可以使用ODS功能分析和研究在這些不同頻率上的工作變形和擾度。
 圖10 機器人的頻域ODS
圖10 機器人的頻域ODS
結(jié)尾
首先感謝您的不離不棄,用極大的耐心將該篇文章閱讀完。
模態(tài)實驗進行了一下午,就順利的結(jié)束了,我們也滿意的拿到了ICEWAVE battlebot模態(tài)參數(shù),驗證了其戰(zhàn)斗的可靠性,并根據(jù)模態(tài)數(shù)據(jù)給予專業(yè)的技術(shù)評估和建議,改善其力學特性,以便能發(fā)揮最大的破壞力及抗擊打能力。
實驗最后,ICEWAVE battlebot給實驗現(xiàn)場的人來了一場真人秀,并當場砸碎了幾個機器人以及周圍的垃圾桶,因為保密的原因我們無法將現(xiàn)場的圖片和視頻發(fā)給各位欣賞,但是ICEWAVE battlebot 將會在電視《探索》頻道(Discovery Channel)上出現(xiàn),我們期待大賽中,它能夠取得優(yōu)異的成績。屆時我們會發(fā)送相關(guān)的表演給大家分享。
The post 使用EDM Modal軟件對機器人進行模態(tài)分析 appeared first on 杭州銳達數(shù)字技術(shù)有限公司.
]]>The post 振動臺擴展頭的模態(tài)試驗分析 appeared first on 杭州銳達數(shù)字技術(shù)有限公司.
]]>下圖是對Sentek公司振動臺HES1200M-1000/560擴展頭做模態(tài)試驗的照片。擴展頭的尺寸是1200 x 1200 mm,擴展頭被固定安裝在Sentek H10056A 100kN振動臺的頂部。
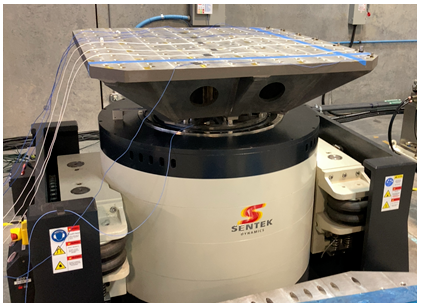 圖1 ??Sentek振動臺安裝
圖1 ??Sentek振動臺安裝
為了確定該擴展頭的頻率響應特性,將擴展頭安裝在振動臺動圈頂部進行模態(tài)試驗。參考點位置選擇在動圈上,在該位置粘貼加速度傳感器,如下圖所示。
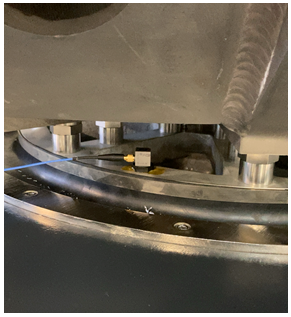 圖2 參考加速度計安裝在振動臺動圈上
圖2 參考加速度計安裝在振動臺動圈上
擴展頭頂部傳感器相對參考點傳感器的傳遞率反應擴展頭對振動的放大和衰減情況。擴展頭對振動的放大和衰減情況可以幫助用戶確定最大工作頻率。
擴展頭頂部平面用7 x 7的網(wǎng)格劃分,共49個測量點。我們用Spider-80M進行試驗,通過巡回傳感器的方法每次測量7個測量點。
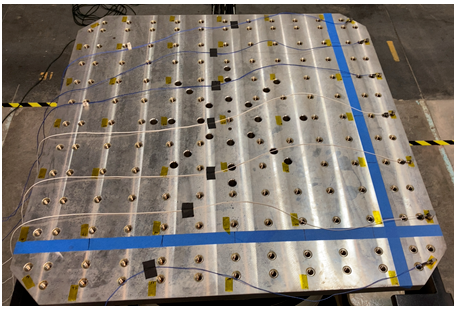 圖3 擴展頭頂部平面的測量點
圖3 擴展頭頂部平面的測量點
在EDM Modal軟件里新建MIMO FRF測試,用寬頻帶隨機激勵信號激勵擴展頭。通過各種實驗嘗試,我們選擇了突發(fā)隨機信號類型。頻率范圍選擇2.3kHz,覆蓋了高達2000Hz的頻率成分。
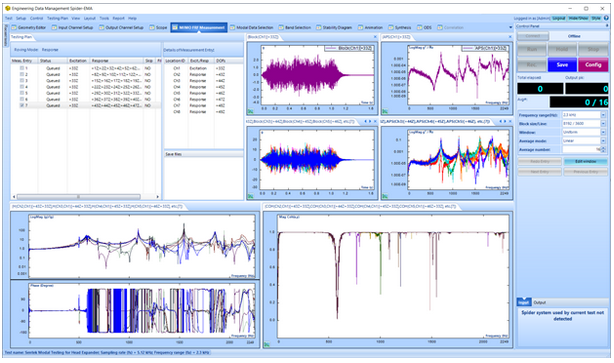 圖4 EDM Modal MIMO FRF測試
圖4 EDM Modal MIMO FRF測試
下圖是49個測量點的FRF信號。
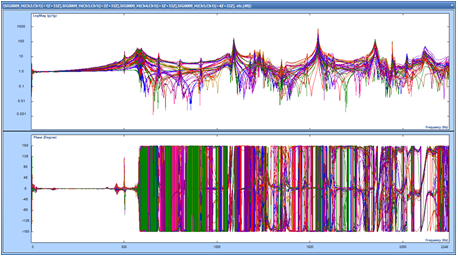
圖5 從模態(tài)數(shù)據(jù)選項疊加的FRF信號
使用EDM Modal 曲線擬合功能,識別出以下幾階模態(tài)。
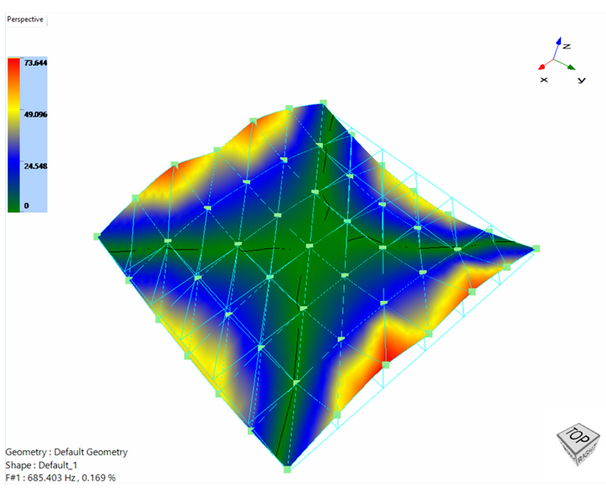 圖6 一階模態(tài)
圖6 一階模態(tài)
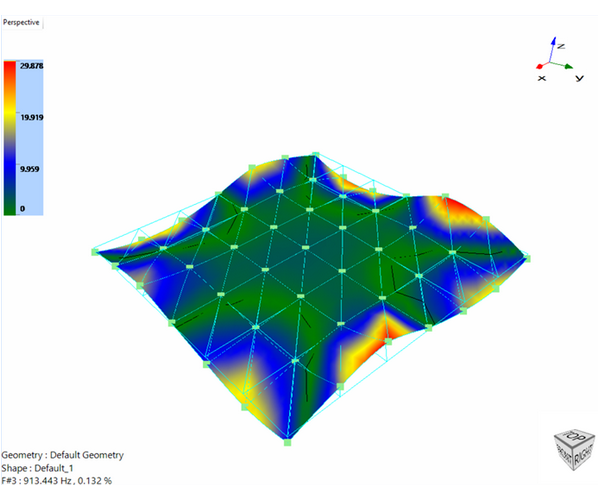
圖7 三階模態(tài)
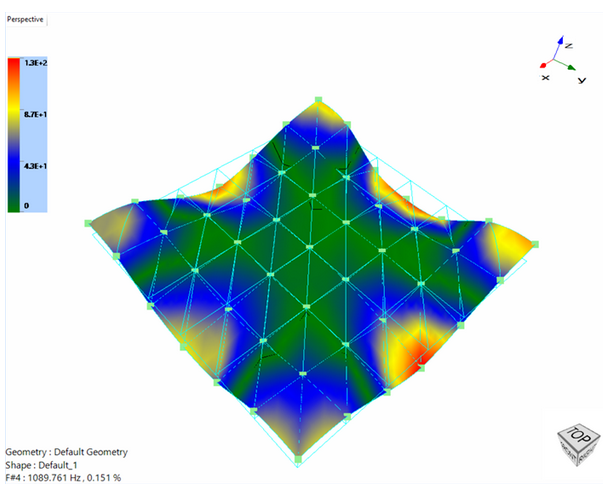
圖8 四階模態(tài)
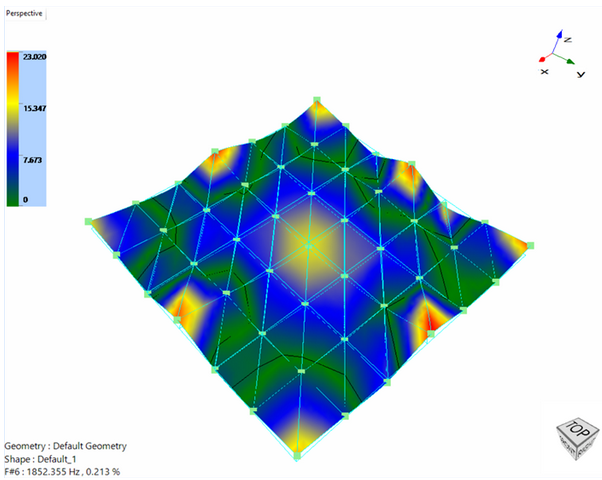 圖9 六階模態(tài)
圖9 六階模態(tài)
這是對HES1200擴展頭進行的第一輪模態(tài)試驗。下一步是對擴展頭做阻尼處理,然后重復進行相同的模態(tài)試驗,比較機械結(jié)構(gòu)的頻率響應和模態(tài)特征是否發(fā)生變化。
The post 振動臺擴展頭的模態(tài)試驗分析 appeared first on 杭州銳達數(shù)字技術(shù)有限公司.
]]>The post 試驗模態(tài)分析中頻率工作擾度形狀(ODS)分析 appeared first on 杭州銳達數(shù)字技術(shù)有限公司.
]]>根據(jù)試驗結(jié)構(gòu)的變形信息(即形變的大小和方向),通過增加阻尼、改變剛度或者重新分配質(zhì)量對試驗結(jié)構(gòu)設(shè)計進行優(yōu)化,改善測試單元的結(jié)構(gòu)性能。
模態(tài)分析軟件EDM Modal 工作擾度形狀?(ODS) 能夠?qū)⒃囼灲Y(jié)構(gòu)的變形很好地可視化。時域數(shù)據(jù)和頻域數(shù)據(jù)通過幾何模型動畫動態(tài)顯示。這一功能在所有的EDM Modal模態(tài)測試和分析類型中都能使用。
時域ODS將結(jié)構(gòu)所有階次的模態(tài)振型疊加顯示。頻域ODS根據(jù)固有頻率劃分,將結(jié)構(gòu)的各階模態(tài)振型單獨顯示。
圖1. 頻域?ODS 動畫
在這個實驗中,有機玻璃板用彈簧繩懸掛,以模擬自由-自由邊界條件。通過EDM Model模態(tài)測試軟件創(chuàng)建有機玻璃板的幾何模型,在幾何模型上劃分網(wǎng)格。用模態(tài)激振器激勵平板,通過在網(wǎng)格測點上巡回的單軸加速度傳感器捕捉響應。
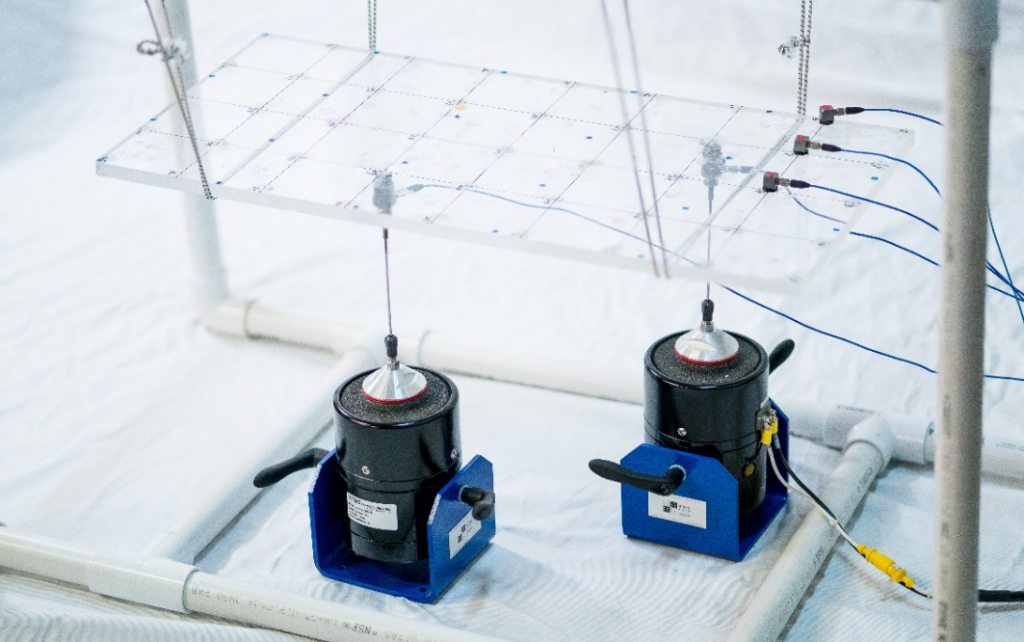
圖?2. 有機玻璃板的模態(tài)激振試驗
這個模態(tài)試驗的采樣率選用1.28kHz,塊大小選用4096,通過這種配置獲得0.3125Hz足夠高的頻率分辨率。每個測量自由度通過28次線性平均計算獲得較低的背景噪聲和較高的測量精度。
突發(fā)隨機激勵可提供576Hz頻率范圍內(nèi)的能量。同時支持設(shè)置突發(fā)百分比,以控制無輸出持續(xù)時間,有利于響應衰減至零。通過這一設(shè)置,信號將不會有泄露,因此可以選用矩形窗。對于這個試驗,輸出幅值設(shè)置成0.2V,突發(fā)百分比設(shè)置成80%。
激振器法模態(tài)試驗完成后,對不同運行的頻響函數(shù)FRF進行處理,以獲得ODS數(shù)據(jù)。?EDM的數(shù)據(jù)庫結(jié)構(gòu)非常便于瀏覽和選擇數(shù)據(jù)。選擇的數(shù)據(jù)集可以通過幾何模型動畫顯示。時域或頻域的振動動畫支持保存為.avi格式的視頻或.gif格式的圖片。任意特定時刻的結(jié)構(gòu)變形可以保存為圖片文件。
源類型根據(jù)測試數(shù)據(jù)集選擇。通常,它可以是時間、FRF或頻譜,比如用于工作模態(tài)分析(OMA)測試的CPS。下面的截圖顯示?FRF ODS動畫。可以通過鼠標將光標沿著頻率橫坐標移動到需要的位置。
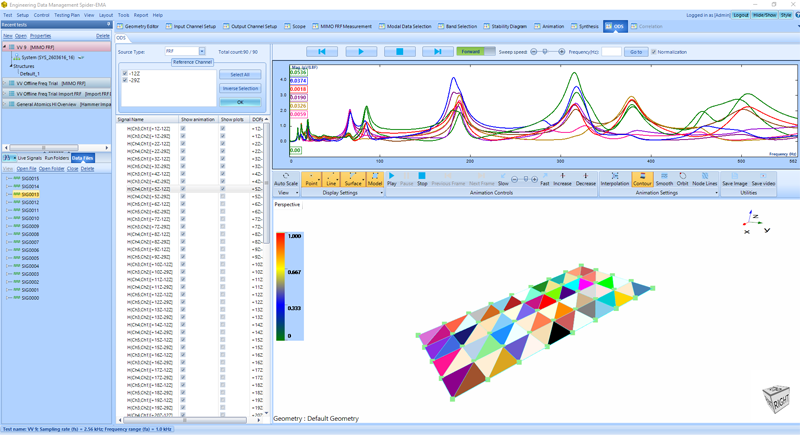 圖?3. FRF ODS
圖?3. FRF ODS
在信號圖的上方,可以點擊播放按鈕來播放ODS動畫。再次點擊播放按鈕,可以停止動畫播放。可以使用向前或向后按鈕向前或向后移動數(shù)據(jù)點。停止按鈕將使當前光標回到開始位置。除了幾何顯示按鈕,還有幅值增大和減小按鈕。
支持駐留在某個頻率、向后掃頻、設(shè)置掃頻速度(滑動條)、設(shè)置動畫速度(滑動條)和歸一化模態(tài)等功能。歸一化模態(tài)有助于放大觀察ODS在非固有頻率對應低振幅頻響下的運動,也有助于清楚地觀察結(jié)構(gòu)各階模態(tài)間的轉(zhuǎn)換。用戶可以通過調(diào)整橫軸和縱軸改變顯示視角和比例。左下角的文本欄會顯示狀態(tài)信息。
下圖顯示了有機玻璃板的ODS,其中圖4是剛性模態(tài),圖5是前兩階彈性模態(tài)。
圖?4. 剛性模態(tài)?ODS
圖?5. 彈性模態(tài)?ODS
了解更多,請訪問https://www.crystalinstruments.com/.
The post 試驗模態(tài)分析中頻率工作擾度形狀(ODS)分析 appeared first on 杭州銳達數(shù)字技術(shù)有限公司.
]]>The post 模態(tài)分析中常規(guī)FFT和使用多分辨率頻譜技術(shù)FFT的比較 appeared first on 杭州銳達數(shù)字技術(shù)有限公司.
]]>
模態(tài)試驗和分析是產(chǎn)品開發(fā)周期中的關(guān)鍵環(huán)節(jié)。有時由于低頻段的頻率分辨率不夠高,測試結(jié)果會出現(xiàn)幾個數(shù)量級的錯誤。晶鉆儀器公司的專利多分辨率(MR)頻譜技術(shù)克服了這個問題。本文介紹了使用常規(guī)FFT和多分辨率頻譜技術(shù)FFT的模態(tài)試驗,并對兩種方法的定量分析結(jié)果如阻尼、FRF幅值、Auto-MAC圖和模態(tài)形狀等進行比較。
試驗
模態(tài)分析是優(yōu)化被測試件力學性能的重要過程。研究結(jié)構(gòu)的固有頻率、阻尼和振型有助于用戶優(yōu)化被測試件的結(jié)構(gòu)。為了準確地獲得模態(tài)參數(shù),適當?shù)嘏渲脺y試參數(shù)和清楚地識別模態(tài)是很重要的。
在機械結(jié)構(gòu)和聲學應用中,許多問題在頻譜分析中都需要非均勻的頻率分辨率。在這些應用中,要求低頻段比高頻段有更高的頻率分辨率。例如,一些機械結(jié)構(gòu)可能在較低的頻率范圍內(nèi)有密集模態(tài),因此更高的頻率分辨率有助于使模態(tài)分析結(jié)果更準確。然而,高分辨率測量和計算可能會花費更多的時間。
晶鉆儀器公司提供獨一無二的多分辨率頻譜專利技術(shù)解決方案。多分辨率頻譜技術(shù)是對單通FFT的一種改進。它的基本原理是對相同的輸入時間流信號進行兩通或多通的FFT變換,然后在頻域中合成一個頻譜。多分辨率頻譜技術(shù)在低頻段提供比高頻段高8倍的頻率分辨率,無需使用巨大的數(shù)據(jù)塊大小和耗費很多計算資源。
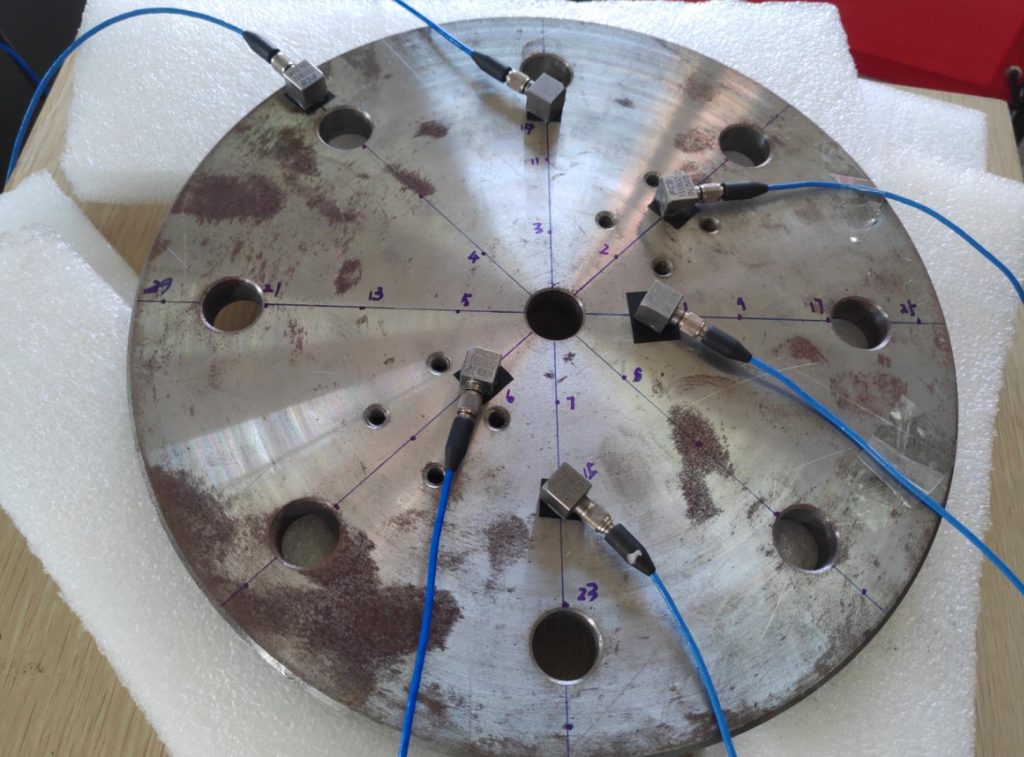
本文的模態(tài)試驗比較了多分辨率頻譜技術(shù)和單分辨率頻譜技術(shù)(常規(guī)FFT)的分析效果。在本案例中,通過MIMO FRF試驗,用兩個模態(tài)激振器和14個加速度傳感器獲得車牌的模態(tài)特征。激振器對結(jié)構(gòu)作長時間的能量激勵,確保有更多的數(shù)據(jù)集。高質(zhì)量的測量也有助于簡化模態(tài)參數(shù)的估計。

圖1. 用Spider-80x做模態(tài)激振試驗
用兩臺晶鉆儀器多通道振動噪聲信號采集儀Spider-80X前端和Spider-Hub組成高通道系統(tǒng)(14個響應通道和2個激勵通道),搭配最新發(fā)布版本EDM Modal 9.0做MIMO FRF試驗。
被測結(jié)構(gòu)用彈簧繩垂直懸掛,模擬自由-自由邊界條件。讓模態(tài)激振器用白噪聲激勵來激勵車牌。車牌的響應用單軸加速度傳感器采集。在模態(tài)激振試驗中經(jīng)常采用巡回響應法,但這種方法往往會引入質(zhì)量附加效應。為了避免質(zhì)量附加效應,一次性在所有測點上粘貼小的單軸加速度傳感器。測量z方向的激勵和響應獲得平面外的模態(tài)振型。模型的網(wǎng)格劃分如下圖所示:
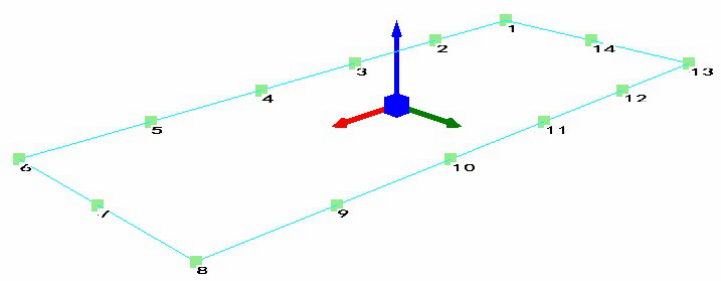 圖2. 車牌幾何模型
圖2. 車牌幾何模型
我們主要關(guān)注低階模態(tài),因此將采樣率設(shè)為5.1kHz,塊大小設(shè)為2048,用Hann窗減少泄露。通過這些設(shè)置得到的頻率分辨率是2.5 Hz. 對每個測量自由度上的16個塊數(shù)據(jù)進行線性平均計算,獲得較高的精度和更低的噪聲。
用多分辨率頻譜技術(shù)在低頻段獲得8倍于高頻段的頻率分辨率,即0.3125Hz。?不同分辨率的實現(xiàn)可以在不增加循環(huán)時間的情況下產(chǎn)生更好的結(jié)果。高頻段和低頻段的截止頻率是250Hz。在低頻段,多分辨率測試結(jié)果更好,因為具有更高的分辨率。在截止頻率之后,多分辨率譜和單分辨率譜的結(jié)果相當,因為它們有相同的頻率分辨率。多分辨率測試和單分辨率測試的所有其它配置均相同。
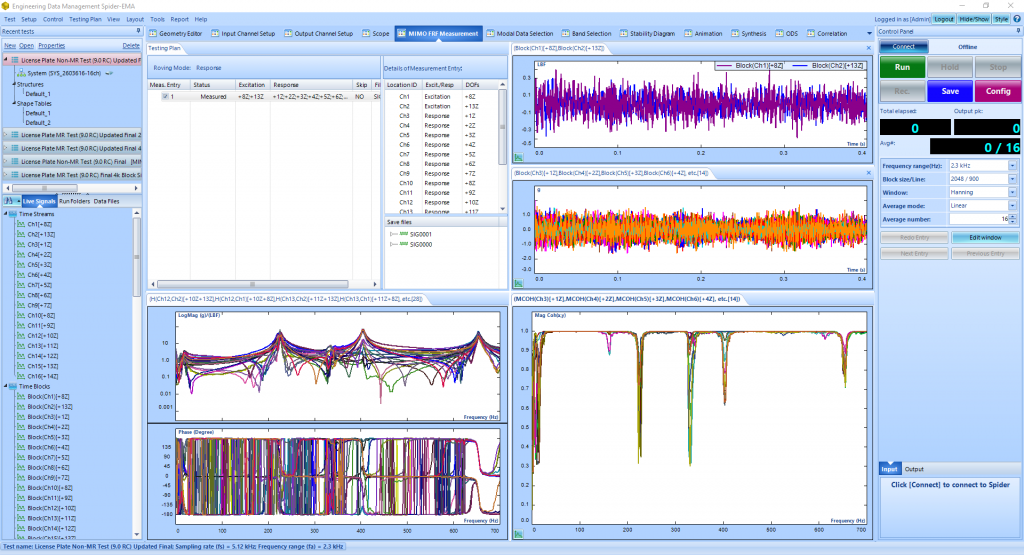
圖?3.車牌單分辨率?MIMO FRF 測試?

圖?4. 車牌多分辨率MIMO FRF測試
測量選項卡屏幕截圖顯示,MR和非MR模態(tài)測試的塊大小是相同的。上圖顯示兩種方法的MIMO FRF測試的塊大小都是0.4s。兩種測試控制面板上的配置也相同。兩種測試都具有很好的相干性(接近1),只在反共振頻率處有個別谷值。這驗證了輸入和輸出具有很好的相關(guān)性。這也說明試驗是可重復的。
FRF顯示在0-700Hz的頻率范圍內(nèi)有4個峰值,在220Hz附近有兩個密集模態(tài)。通過繪制所有FRF的虛部,可以到觀察測量自由度之間的相位關(guān)系。在虛部圖中,各條曲線的峰值位置有良好的一致性,說明不存在質(zhì)量附加效應。

圖?5. 模態(tài)數(shù)據(jù)選擇選項卡顯示非MR模態(tài)測試的FRF的虛部
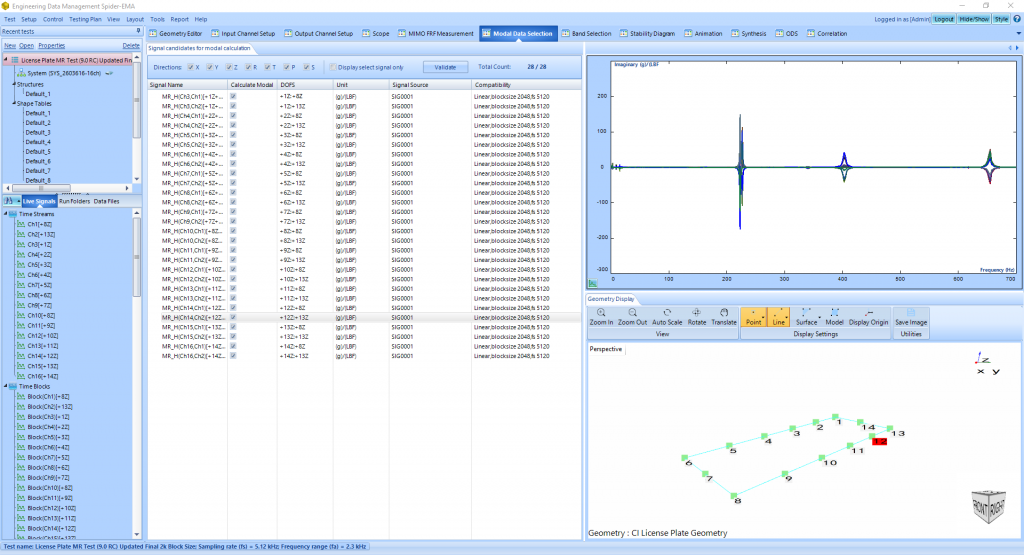
圖?6. 模態(tài)數(shù)據(jù)選擇選項卡顯示MR模態(tài)測試的FRF的虛部
?
上圖表明,所有的峰值都可以通過MR和非MR模態(tài)試驗識別出來。然而,由于在0-250Hz范圍內(nèi)使用了多分辨率技術(shù),重根模態(tài)有更尖銳和清晰的峰,可以將密集模態(tài)很好地分離。
模態(tài)分析
用?Poly-X算法?(最小二乘復頻域法)和30階多項式擬合FRF,?生成如下圖所示的穩(wěn)態(tài)圖。?由于使用兩個激振器作激勵?(兩參考點), 因此穩(wěn)態(tài)圖中有兩個復模態(tài)指示函數(shù)。在分析頻率范圍內(nèi)得到4階模態(tài)。

圖7. 非MR MIMO FRF測試的穩(wěn)態(tài)圖
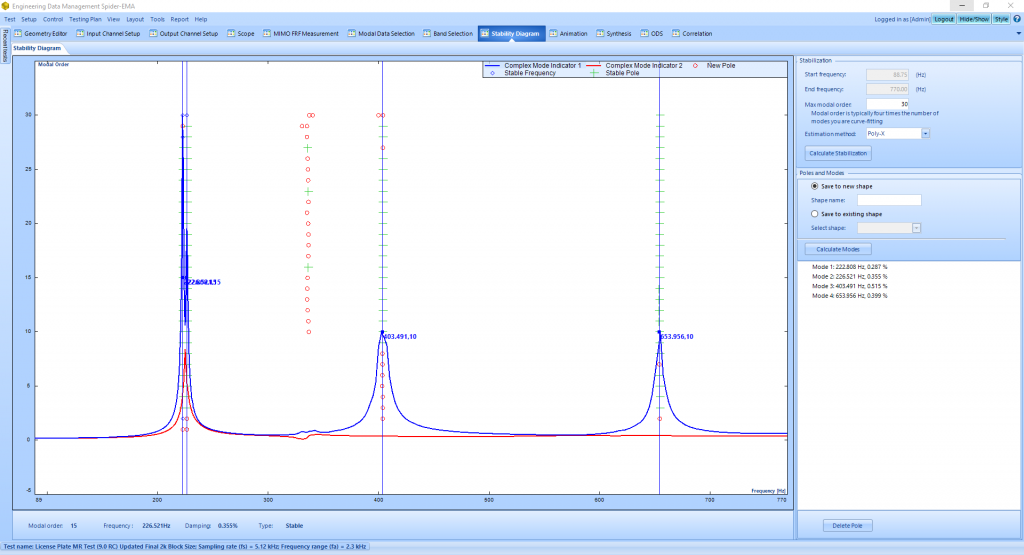
圖8. MR MIMO FRF測試的穩(wěn)態(tài)圖
穩(wěn)態(tài)圖顯示,MR和非MR模態(tài)試驗均能有效地識別出分析頻率范圍內(nèi)的4階模態(tài)。然而,峰值更尖銳有助于更好地計算阻尼和模態(tài)振型。
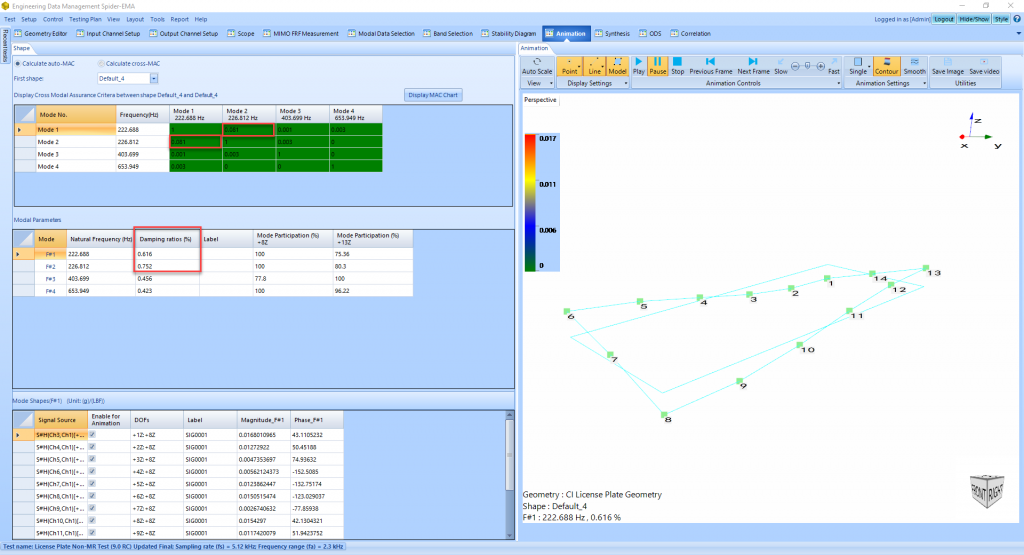
圖9. 非MR MIMO FRF測試的模態(tài)結(jié)果
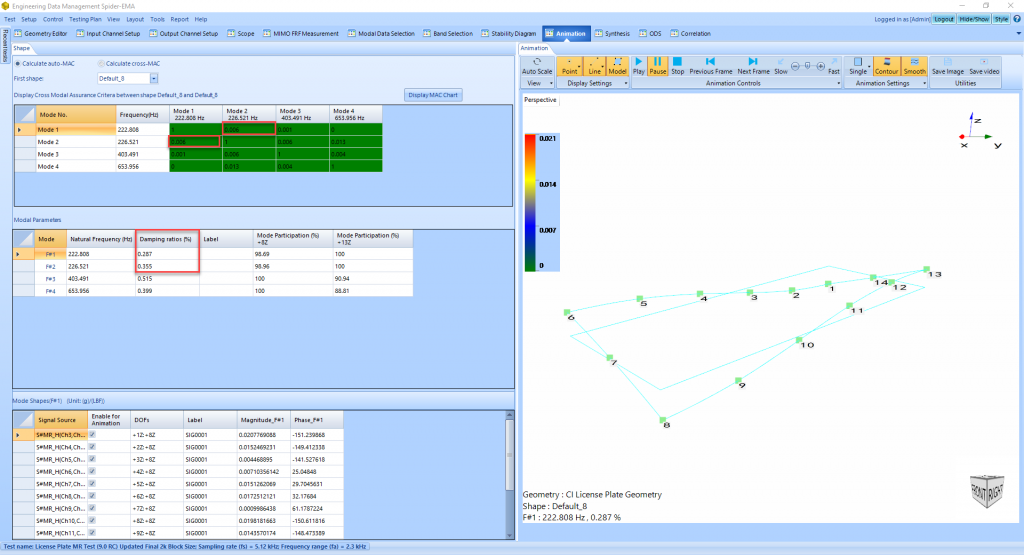
圖10. MR MIMO FRF測試的模態(tài)結(jié)果
與非MR 模態(tài)測試相比,MR模態(tài)測試能夠更好地識別前兩階模態(tài)的阻尼。在截止頻率250Hz之后,由于測試設(shè)置相同,MR和非MR測試結(jié)果相似。
| 共振頻率 | MR阻尼評估 | 非MR阻尼評估 | 誤差 |
| 222.808 Hz | 0.287 | 0.616 | 大2.14倍 |
| 226.521 Hz | 0.355 | 0.752 | 大2.11倍 |
| 403.491 Hz | 0.515 | 0.456 | 11.4% |
| 653.956 Hz | 0.399 | 0.423 | 5.6% |
因為MR測試在低頻段的頻率分辨率更高,所以測出的峰值更清晰,從而大大提高了FRF幅值估計的準確性。如下圖所示,選擇同一個自由度的FRF樣本進行比較。在截止頻率250Hz之后,MR和非MR測試的結(jié)果相似,因為它們具有相同的頻率分辨率。
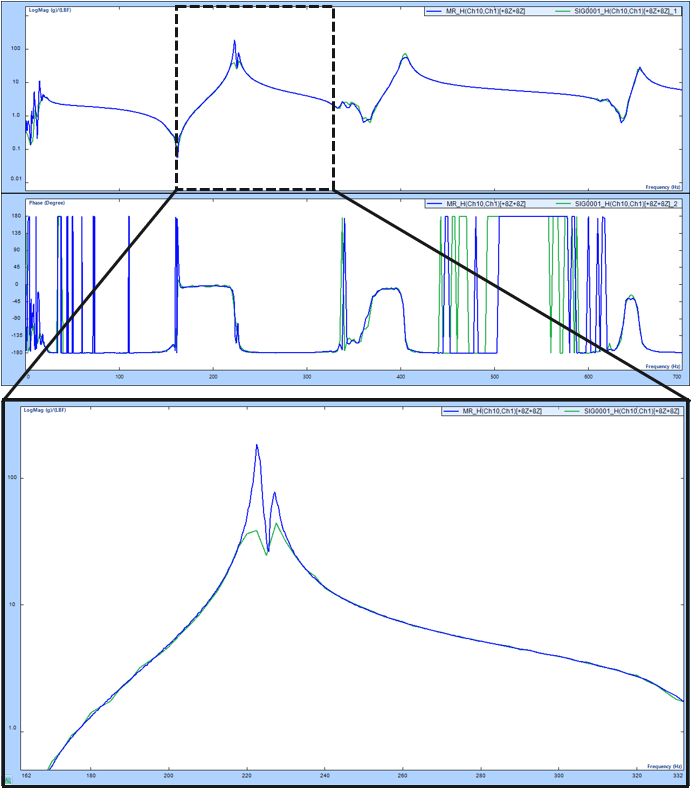
圖11. MR 和非MR MIMO測試FRF比較
| 共振頻率 | MR方法 FRF幅值評估?(g/LBF) | 非MR方法FRF 幅值評估(g/LBF) | 誤差 |
| 222.808 Hz | 184.8007 | 38.6557 | 小4.78 倍 |
| 226.521 Hz | 77.7309 | 44.2140 | 小1.75倍 |
| 403.491 Hz | 52.3 | 65.7 | 20.3% |
| 653.956 Hz | 29.02 | 24.64 | 15% |
Auto-MAC矩陣幫助用戶驗證模態(tài)試驗的結(jié)果。下面的Auto-MAC圖表示各階模態(tài)是相互正交的(較低的非對角元素),并且是唯一標識的(較高的對角元素)。
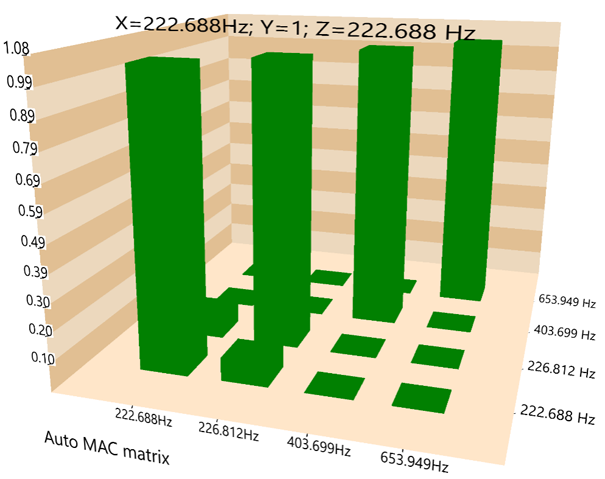
圖12.非MR MIMO FRF測試MAC 圖?

圖13. MR MIMO FRF測試MAC 圖
MAC圖顯示非MR和MR模態(tài)測試的結(jié)果都是良好的。然而對于非MR模態(tài)測試,一階模態(tài)和二階模態(tài)的相關(guān)性更高。對于MR模態(tài)測試,因為交叉元素更接近零,一階模態(tài)和二階模態(tài)更容易區(qū)分。
采用MR技術(shù)得到的模態(tài)振型相對較好,因為具有更高的FRF幅值和更好的相位精度。左邊為非MR模態(tài)測試得到的振型,右側(cè)為MR模態(tài)測試得到的振型。
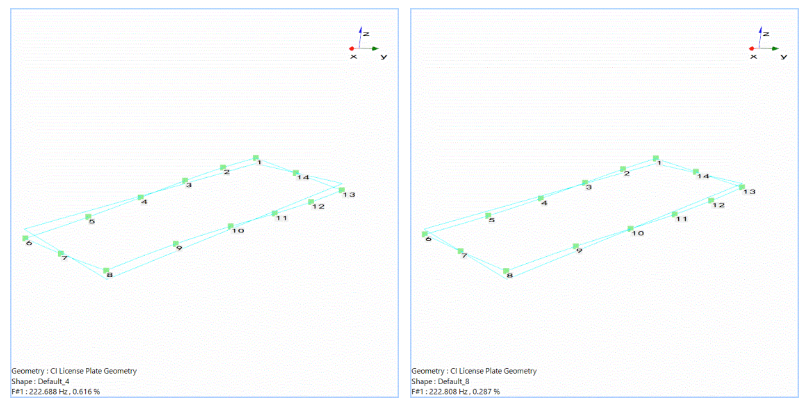
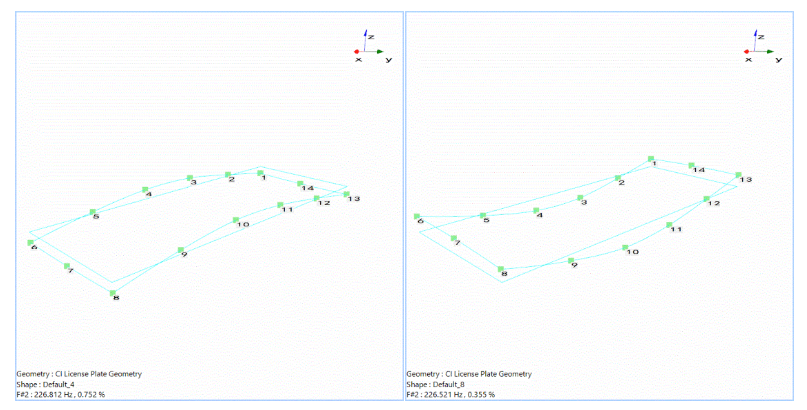 左邊為非MR模態(tài)測試得到的振型,右側(cè)為MR模態(tài)測試得到的振型
左邊為非MR模態(tài)測試得到的振型,右側(cè)為MR模態(tài)測試得到的振型
結(jié)果說明了多分辨率頻譜技術(shù)在實驗模態(tài)分析中的獨特優(yōu)勢。
要了解更多關(guān)于多分辨率頻譜分析的知識,請訪問: http://www.cn-hua.com/5159.html
The post 模態(tài)分析中常規(guī)FFT和使用多分辨率頻譜技術(shù)FFT的比較 appeared first on 杭州銳達數(shù)字技術(shù)有限公司.
]]>The post 剎車盤制動盤模態(tài)測試分析方法 appeared first on 杭州銳達數(shù)字技術(shù)有限公司.
]]>
剎車盤(制動盤)模態(tài)分析的最主要目的就是解決噪音問題,而噪音問題歸根結(jié)底是振動,而作為制動噪音,其發(fā)生根源是由于摩擦片在制動盤上的切向振動造成的,所以如果制動盤在盤面內(nèi)的切向扭轉(zhuǎn)振型所對應的頻率與摩擦片切向振型所對應的頻率接近,很容易誘發(fā)加劇摩擦片的振動。所以制動盤的模態(tài)分析就是要發(fā)現(xiàn)制動盤面內(nèi)扭轉(zhuǎn)振動所對應的固有頻率。
準備設(shè)備:
振動數(shù)據(jù)采集儀Spider-80X
PCB模態(tài)力錘 086C04
PCB加速度傳感器333B30
晶鉆模態(tài)分析軟件EDM-Modal
測試現(xiàn)場:
測試過程:
模態(tài)測試方法選用錘擊法。力錘法適用于非線性不是很強的試件,而剎車盤是線性結(jié)構(gòu)非常好的剛性結(jié)構(gòu),這里選擇錘擊法是在合適不過的了。激振器法適用于復雜結(jié)構(gòu)與非線性很強的試件,如主機、儀器儀表燈。
錘擊法有兩種測試方法,一種是移動力錘法,即在制動盤上標記好測試點,固定傳感器位置,將力錘逐點敲擊,通過振動采集儀獲取FFT信號。另一種是移動傳感器法,即標記好測試點,力錘敲擊固定測點,逐個移動傳感器位置,通過振動采集儀獲取FRF信號。這里我們采用第一種。
打開晶鉆模態(tài)分析軟件EDM-Modal,選擇錘擊法模態(tài)測試,通過模態(tài)軟件幾何模型編輯簡化制動盤模型,劃分為32個測點(盡量多的測點,這樣能看出振動效果),如下圖。
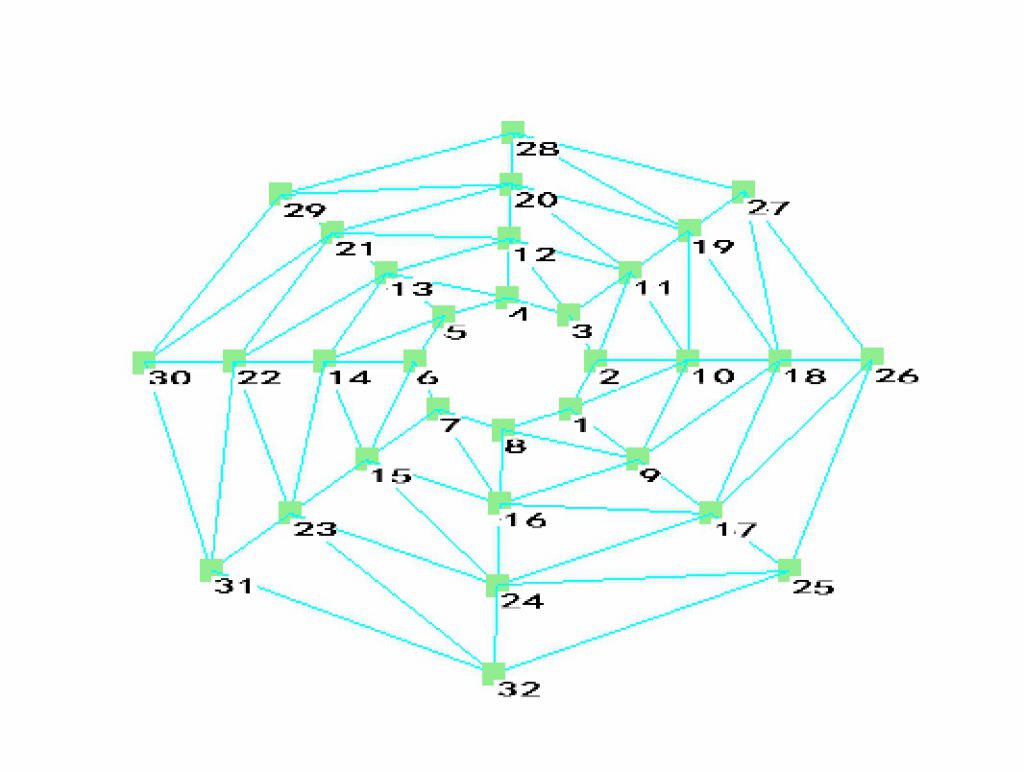
在#1,#10,#19,#28,#14,#23一共6個點粘貼傳感器,力錘從#1-#32分別錘擊,通過Spider-80X動態(tài)信號分析儀獲取RFR信號,每個測點取三次平均值。
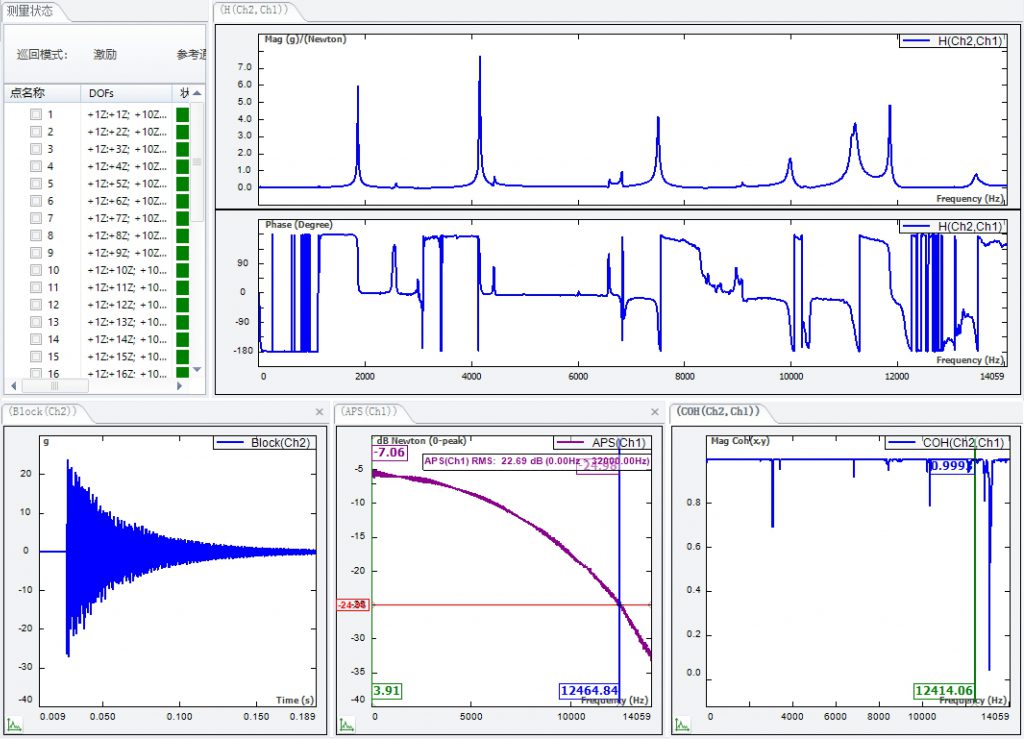
實驗采集的FRF數(shù)據(jù)非常理想,力譜到了12000Hz才衰減,相干也很好,F(xiàn)RFs很清晰。
模態(tài)分析上選擇Ploy-X(最小二乘復頻域法)進行模態(tài)分析,計算穩(wěn)態(tài)圖。
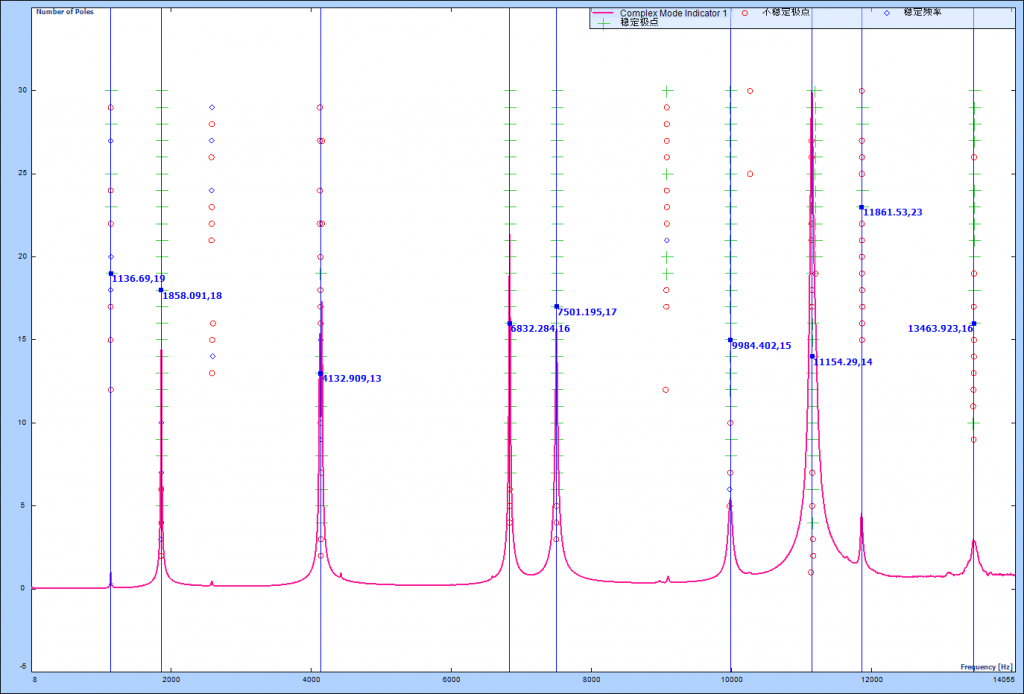
從穩(wěn)態(tài)圖中選擇極點,數(shù)據(jù)看上去也非常好,階次很明顯。
進入動畫界面,評估模態(tài)實驗分析效果,可通過MAC圖分析。數(shù)據(jù)成對角線,說明非常好。
查看剎車盤振型模態(tài)數(shù)據(jù)動畫,如下圖。
最后生成報告,模態(tài)試驗結(jié)束。正常情況下,實驗要做采集多組數(shù)據(jù),選擇最好的一組生成報告。
模態(tài)試驗的好壞,很大部分原因取決于高質(zhì)量的FRF數(shù)據(jù),以及模態(tài)軟件的算法識別。晶鉆儀器模態(tài)測試分析軟件中英文界面,向?qū)教崾荆胤治龊啿僮鳎瞿B(tài)試驗您值得擁有。
The post 剎車盤制動盤模態(tài)測試分析方法 appeared first on 杭州銳達數(shù)字技術(shù)有限公司.
]]>The post 198通道數(shù)錘擊法與激振器法模態(tài)試驗 appeared first on 杭州銳達數(shù)字技術(shù)有限公司.
]]>近期,銳達工程師應某客戶的邀請,協(xié)助用戶給其研發(fā)的電子產(chǎn)品做模態(tài)分析,了解產(chǎn)品結(jié)構(gòu)特性,降低產(chǎn)品大批量部署時產(chǎn)品因為共振等因素引發(fā)的故障風險。如下圖為模態(tài)測試現(xiàn)場,試件模態(tài)實驗共計198個測點,硬件使用高通道數(shù)據(jù)采集儀Spider-80Xi(一個機箱最大64通道,并聯(lián)可擴展到256個通道),傳感器為PCB三軸加速度計,模態(tài)測試軟件為EDM-Modal,分別用錘擊法模態(tài)測試與激振器法模態(tài)測試。
198通道數(shù)錘擊法模態(tài)試驗
198通道數(shù)激振器法模態(tài)試驗
198通道數(shù)激振器法模態(tài)試驗
198通道數(shù)模態(tài)試驗-試件模態(tài)效果
杭州銳達為廣大用戶提供完整的振動噪聲測試解決方案。一套Spider硬件,即可做振動控制、數(shù)據(jù)采集、模態(tài)分析、故障診斷分析,大大降低了用戶的采購成本。隨時歡迎用戶前來咨詢,提供技術(shù)指導和上門演示等服務。
The post 198通道數(shù)錘擊法與激振器法模態(tài)試驗 appeared first on 杭州銳達數(shù)字技術(shù)有限公司.
]]>The post 視頻教學–如何用振動臺做模態(tài)試驗 appeared first on 杭州銳達數(shù)字技術(shù)有限公司.
]]>該視頻演示的是如何用振動臺做模態(tài)試驗,通過多個參考信號和多個響應測量,能夠生成頻響函數(shù)矩陣這是指多輸入多輸出(MIMO)測試。實驗非常簡單和便捷,小伙伴來學習下吧。
如果您無法正常播放該視頻,請復制到瀏覽器訪問:https://v.qq.com/x/page/b0908qjca60.html
相關(guān)視頻:
錘擊法模態(tài)測試;https://v.qq.com/x/page/u090478j1c2.html;?
做模態(tài)試驗要做哪些準備工作: https://v.qq.com/x/page/i0855rcia8c.html
模態(tài)試驗教學視頻相關(guān)字幕說明
上一集我向你們展示了如何用模態(tài)錘做模態(tài)試驗。這一集,我將向你展示如何用振動臺做模態(tài)試驗。我們需要用一臺振動臺激勵結(jié)構(gòu)。通過多個參考信號和多個響應測量,能夠生成頻響函數(shù)矩陣這是指多輸入多輸出(MIMO)測試。
結(jié)構(gòu)在幾個固定的自由度上激勵,響應在多個自由度上測量。如果動態(tài)信號分析儀沒有足夠多的輸入通道來采集所有自由度上的信號,我們可以移動結(jié)構(gòu)上的傳感器。重復測試直到所有自由度上都采集到信號。
振動臺由一臺功率放大器驅(qū)動,功率放大器接收來自動態(tài)信號分析儀的信號。可以選擇有很多波形來驅(qū)動被測結(jié)構(gòu)。常用的波形有突發(fā)隨機、周期隨機和偽隨機。被測結(jié)構(gòu)必須在測試前安裝好。被測結(jié)構(gòu)通過彈簧繩自由懸掛。被測結(jié)構(gòu)安裝好了之后,振動臺通過力桿結(jié)構(gòu)連接。
在數(shù)據(jù)采集之前,必須對結(jié)構(gòu)測點劃分進行定義。在結(jié)構(gòu)上標記了一組測點。之前,我已經(jīng)EDM模態(tài)軟件中對測點進行劃分,因此,我只需簡單地導入網(wǎng)格文件。現(xiàn)在開始配置模態(tài)軟件。打開EDM model和新的向?qū)АT谶@里,你可以看到模態(tài)測試類型列表。選擇MIMO FRF測試,按向?qū)崾就瓿墒S嗖襟E。
這里是EDM model的第一部分,幾何編輯。
這里是定義結(jié)構(gòu)幾何尺寸的地方。模態(tài)是基于測點ID構(gòu)造的。在這個教程中,我們加載一個模型文件。點擊文件路徑按鈕加載模型文件。打開模型文件后,對輸入通道進行設(shè)置。輸入每個通道的傳感器靈敏度參數(shù)。確保測點IDs 對應正確的通道,增量點數(shù)正確。現(xiàn)在點擊輸出通道設(shè)置選項卡。這里你可以配置輸出信號類型。我們打開輸出通道開關(guān),我們將輸出類型設(shè)置為突發(fā)隨機,或者根據(jù)試驗要求設(shè)置為其它類型。
下一個選項卡稱為scope。在這里檢查儀器狀態(tài)的動態(tài)信號顯示。在這里確認傳感器通道是正常工作的,驅(qū)動電壓足夠。準備好了以后,切換到MIMO FRF測試頁面。這是測試過程的顯示界面。信號在屏幕的中間顯示,這也可以根據(jù)用戶需要調(diào)整。在屏幕的左側(cè)有一個信號的列表。它們可以被拖拽已有的信號窗口,或者雙擊它們創(chuàng)建一個新的信號顯示窗口。
現(xiàn)在讓我們配置測試參數(shù)。
點擊配置按鈕,彈出的窗口顯示信號分析參數(shù)。頻率范圍、塊大小、重疊率和平均數(shù)在這里設(shè)置。設(shè)置完了點擊OK。現(xiàn)在已經(jīng)做好開始運行測試的準備了。點擊控制面板.上的Run按鈕開始測試。動態(tài)數(shù)據(jù)在信號顯示窗口顯示。當平均數(shù)達到時,測試停止。
現(xiàn)在我們移動傳感器到下一組測點。我們需要這么做,因為在一次測試中沒有足夠多的輸入通道和傳感器去覆蓋整個結(jié)構(gòu)。我們需要進行多次測試來獲取所有的數(shù)據(jù)。
現(xiàn)在我們已經(jīng)將傳感器移動到新的位置。我們已經(jīng)做好了測量下一組數(shù)據(jù)的準備。測點DOFs自動更新到結(jié)構(gòu)上新的位置。我們必須重復測試直到結(jié)構(gòu)上所有的測點都被測量過。對結(jié)構(gòu)上所有的測點測量后,我們轉(zhuǎn)到模態(tài)數(shù)據(jù)選擇、帶選擇、穩(wěn)態(tài)圖、動畫形變顯示。你可以在模態(tài)數(shù)據(jù)選項卡中查看已經(jīng)獲得的FRF信號。
在這里,你可以管理和查看測試。這是用來分析的信號列表。通過右擊鼠標來添加或移除測試信號。你可以從屏幕左側(cè)的數(shù)據(jù)文件中拖拽信號。你也可以通過屏幕底部的專用按鈕導入或者導出信號。
這是我們模態(tài)教程系列的第三部分。請繼續(xù)關(guān)注第四部分。
The post 視頻教學–如何用振動臺做模態(tài)試驗 appeared first on 杭州銳達數(shù)字技術(shù)有限公司.
]]>The post 視頻教程-實驗模態(tài)分析演示使用錘擊法模態(tài)實驗獲取模態(tài)數(shù)據(jù) appeared first on 杭州銳達數(shù)字技術(shù)有限公司.
]]>模態(tài)試驗教學視頻相關(guān)字幕說明:
在上一集中,我們向您展示了在晶鉆儀器公司如何準備模態(tài)試驗。這一集,我們要做模態(tài)試驗,演示如何通過錘擊法,獲得模態(tài)數(shù)據(jù)。通常用力錘一類的力傳感器來測量激勵力。一個或多個加速度計來測量響應。有兩種測量方法,而且兩種法法都把激勵作為參考。第一種方法是移動力錘,你可以用力錘對結(jié)構(gòu)的多個測試點進行激勵,響應點固定。第二種方法是移動響應點,固定激勵點,響應從多個不同的點采集。在這個視頻中,我將演示用移動激勵力錘的方法來進行試驗。
在安裝程序中點擊“新建測試”,這里列出了幾種測試類型。這將決定如何獲取模態(tài)數(shù)據(jù)。這個試驗,我們選擇”錘擊法”。如果有可用的3D結(jié)構(gòu)模型文件,你可以跳過創(chuàng)建3D模型的過程。點擊”選擇”按鈕,讀入本地的模型文件,按提示操作其余的步驟。幾何編輯器中顯示結(jié)構(gòu)的3D模型。我們可以檢查結(jié)構(gòu)上測試點的自由度。我們不需要對模型做任何修改。
我們接著對輸入通道進行配置。這里,我們只需要兩個通道,因此我們將其它的通道關(guān)閉我們對通道靈敏度和輸入模式、測試配置進行設(shè)置。現(xiàn)在,我們在“測試”選項卡中對分析參數(shù)進行配置。這個界面顯示測試過程中各個測點的狀態(tài),哪些測點已經(jīng)完成,哪些測點仍未完成。
通過屏幕右側(cè)的控制面板界面,你可以停止測試,并對測試進行配置。分析參數(shù)直接位于控制按鈕下方。根據(jù)試驗要求配置參數(shù)。由于我們是做巡回激勵測試,我們必須選擇巡回模式。現(xiàn)在回到輸入通道列表配置自由度。我們必須給每個通道配置測點ID和增量點數(shù)。由于這是巡回激勵測試,我們必須確保激勵通道對應結(jié)構(gòu)上適當?shù)狞c位。測點ID代表自由度點數(shù)。由于我們從點1開始,我們需要選擇這個數(shù)字作為激勵通道的測點ID。每測量一次,我們都要改變一個激勵點,因此我們將激勵通道的增量點數(shù)設(shè)置為1。增量點數(shù)指每次測試結(jié)束增加多少個測點。我們將響應通道的增量點數(shù)設(shè)為0,將激勵通道的增量點數(shù)設(shè)為1。現(xiàn)在回到測試屏幕。現(xiàn)在測試參數(shù)已經(jīng)配置好了,我們可以開始測試。
點擊運行按鈕開始測試。觸發(fā)窗口顯示已經(jīng)做好接收模態(tài)錘的激勵信號的準備。觸發(fā)預覽窗口顯示激勵和響應信號。在檢查過激勵信號后,我們可以選擇接收或拒絕這個信號。被拒絕的信號將不參與平均計算。一旦達到平均次數(shù),觸發(fā)信號窗口將關(guān)閉,F(xiàn)RF數(shù)據(jù)將被保存。移動力錘到下一個激勵點,你會發(fā)現(xiàn)激勵通道增加了1位。我們可以在屏幕的右邊看到測試的變化。我們繼續(xù)這個過程直到你獲得所有的測點。一旦所有的點都被測量了,我們可以查看獲得的數(shù)據(jù)。點擊模態(tài)數(shù)據(jù)選擇選項卡。模態(tài)數(shù)據(jù)選擇選項卡是我們管理測試數(shù)據(jù)的地方。列表顯示所有已經(jīng)測得的FRF數(shù)據(jù)測試過程中,我們可以導入FRF信號到這個列表,我們也可以移除FRF信號來重復或替換一個測試。現(xiàn)在沒有可以刪除的之前的FRF信號。我們只需獲得新的FRF,它將會替代已經(jīng)存在的FRF舉個例子,假如我們將點5的模態(tài)數(shù)據(jù)替換,我們需要重新給輸入通道配置合適的測點ID。我只讓一個響應通道可用,因為當我要在點5重復測試時,我需要替換這個測試。一旦老的FRF完成,新的FRF會替換老的FRF。你在模態(tài)數(shù)據(jù)選擇選項卡中可以看到每個給定點只允許有一個FRF信號。這說明了模態(tài)數(shù)據(jù)獲取過程。
The post 視頻教程-實驗模態(tài)分析演示使用錘擊法模態(tài)實驗獲取模態(tài)數(shù)據(jù) appeared first on 杭州銳達數(shù)字技術(shù)有限公司.
]]>The post 全功能模態(tài)分析 Poly-X(最小二乘復頻域法) appeared first on 杭州銳達數(shù)字技術(shù)有限公司.
]]>Poly-X是頻域模態(tài)參數(shù)估計方法。 這種曲線擬合方法比先前用于估計測試結(jié)構(gòu)的模態(tài)特征的方法更快更清晰。 下圖顯示,使用相同的頻段和相同數(shù)量的模態(tài),Poly-X曲線擬合器提供了更清晰的穩(wěn)態(tài)圖,并具有更少的計算模型。 這使得用戶更容易選擇穩(wěn)定的極點來提取固有頻率,阻尼,并最終提取被測結(jié)構(gòu)的模態(tài)振型。
Poly-X模態(tài)參數(shù)識別算法特征:
- 基于頻域的估算方法
- 可用于單參考點或多參考點FRF數(shù)據(jù)集
- 更快更有效的曲線擬合方法
- 更清晰的穩(wěn)態(tài)圖
- 較少的計算模型
- 更容易選擇穩(wěn)定極點
相關(guān) EMD Modal 模態(tài)測試軟件功能
模態(tài)分析軟件 EDM Modal –實驗模態(tài)分析方案
模態(tài)分析軟件 EDM Modal – 幾何模型編輯(Geometry)
模態(tài)分析軟件 EDM Modal –工作變形分析(ODS)
模態(tài)分析軟件 EDM Modal – 錘擊法模態(tài)測試(Hammer Impact Testing)
模態(tài)分析軟件 EDM Modal – SIMO FRF模態(tài)測試(SIMO FRF Testing)
模態(tài)分析軟件 EDM Modal – MIMO FRF測試(MIMO FRF Testing)
模態(tài)分析軟件 EDM Modal – SIMO正弦掃頻模態(tài)測試(SIMO Swept Sine Testing)
模態(tài)分析軟件 EDM Modal – SIMO步進正弦模態(tài)測試(SIMO Stepped Sine Testing)
模態(tài)分析軟件 EDM Modal – MIMO步進正弦模態(tài)測試(MIMO Stepped Sine Testing)
模態(tài)分析軟件 EDM Modal – 工作模態(tài)測試( Operational Modal Testing )
模態(tài)分析軟件 EDM Modal – 標準模態(tài)分析(Standard Modal Analysis)
模態(tài)分析軟件 EDM Modal – 高級模態(tài)分析(Advanced Modal Analysis)
模態(tài)分析軟件 EDM Modal – 全功能模態(tài)分析 Poly-X(Premium Modal Analysis)
The post 全功能模態(tài)分析 Poly-X(最小二乘復頻域法) appeared first on 杭州銳達數(shù)字技術(shù)有限公司.
]]>