The post 機械零部件剎車盤振動測試固有頻率解決方案 appeared first on 杭州銳達數字技術有限公司.
]]>客戶需求:
用戶是一家生產剎車盤實力雄厚的企業,日產量大,而且尺寸不一。為滿足高品質客戶對剎車盤固有頻率要求,組裝運行時,避免共振的產生。用戶針對該部分客戶提供的剎車盤需要抽檢,測試產品的固有頻率,以滿足用戶的需求。
解決方案:
剎車盤由于材質、材料屬性、形狀的不同會影響自身剛度和質量。它的固有頻率只受剛度分布和質量分布的影響,阻尼對固有頻率的影響有限。質量增大固有頻率必然降低,剛度增大固有頻率必然增大。
理論上講,剎車盤有多階固有頻率。在二維頻譜圖中,并不是所有的峰值對應的都是固有頻率,因為有可能是激勵頻率或是它的倍頻。因此通常通過測量頻響函數的方式來測量固有頻率,頻響函數對應的峰值都是系統的固有頻率。多數情況下,我們只關心低階或特定階固有頻率。
1、經濟型方案
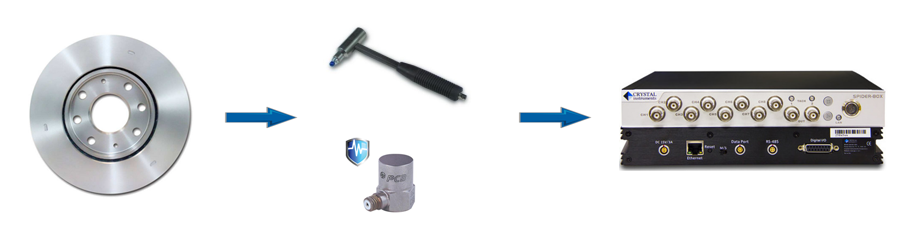 圖一 設備鏈接示意圖
圖一 設備鏈接示意圖
采用錘擊法進行FRF測量,計算固有頻率。錘擊法具有激勵設備要求簡單(力錘),響應傳感器最少一個就可以,試驗方法快捷,試驗總成本低的優點。理論上在一個位置安裝一個傳感器就能測量出剎車盤所有固有頻率。由于在實際布置時模態參考點時,要避開關心的所有模態節點,所以受到測量位置、激勵位置的影響,建議測量剎車盤固有頻率時,安裝兩個傳感器測量,對比兩個頻響函數的峰值。或者一個傳感器移動兩次位置,測量兩次結果比對。這樣更準確。如果想要得到剎車盤的振動形態與阻尼,更好的分析剎車盤性能建議再購買一套晶鉆自主研發的模態分析軟件EDM-Modal。
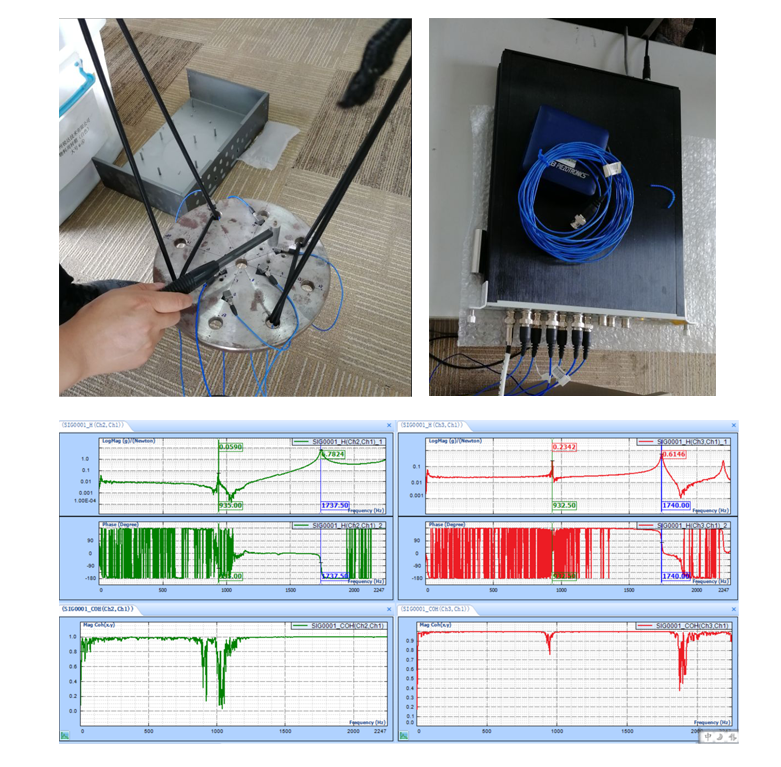 圖二 現場實驗示意圖
圖二 現場實驗示意圖
實驗設備:
- Spider-80X 8通道多通道數據采集系統
- 力錘
- 加速度傳感器 2個
用軟彈力繩或彈簧將剎車盤懸掛,使其處于自由狀態,可有增加測量有效性。
IEPE型PCB加速度傳感器352C03,底部平坦,配有磁座,可直接吸附在剎車盤上固定,通過線纜直接接到Spider-80X動態信號分析儀器的BNC接口上(Spider內置IEPE調理,無需供電)。將加速度傳感器吸附在剎車盤上。
將力錘通過BNC先接入儀器輸入通道。在剎車盤任意位置選擇激勵點,垂直方向,點擊敲擊一次,接收。同一位置,重復敲擊一次,接收(此處可簡化,EDM支持設置手動接收、自動接收)。
Spider-80X的最大采樣速率為102.4KHz/通道,保證對高頻信號的完整記錄。24位A/D和D/A轉換、150dB動態范圍、自動設置量程,確保了采集數據的準確性。
PC中的EDM -DSA軟件會實時顯示剎車盤頻響函數測量結果。首先查看相干性曲線,如果趨于1表示,表示頻響函數測量質量高,否則重新需要重新測量。最后查看頻響函數曲線,取其峰值。峰值1為一階,峰值2為二階,以此類推。增加游標和標記,確定其峰值,記錄。
該方案屬于經濟型,實驗環境簡單,測量方便,設備成本低,測量不同尺寸、形狀的剎車盤十分方便。缺點是人為操作比較多,測量結果受測試人員試驗技術水平影響較大,測量效率不高。適用于每日測量任務不多的情況。考慮工作量,可適當增加設備彌補。
2、精準型方案
 圖三 設備鏈接示意圖
圖三 設備鏈接示意圖
振動臺掃頻測試方法,將剎車盤通過夾具安裝在振動臺上進行掃頻激勵,然后分析響應信號獲得結構的固有頻率。
實驗設備:
- Spider-81B ??4通道振動測試系統
- 振動臺
- 加速度傳感器 2個
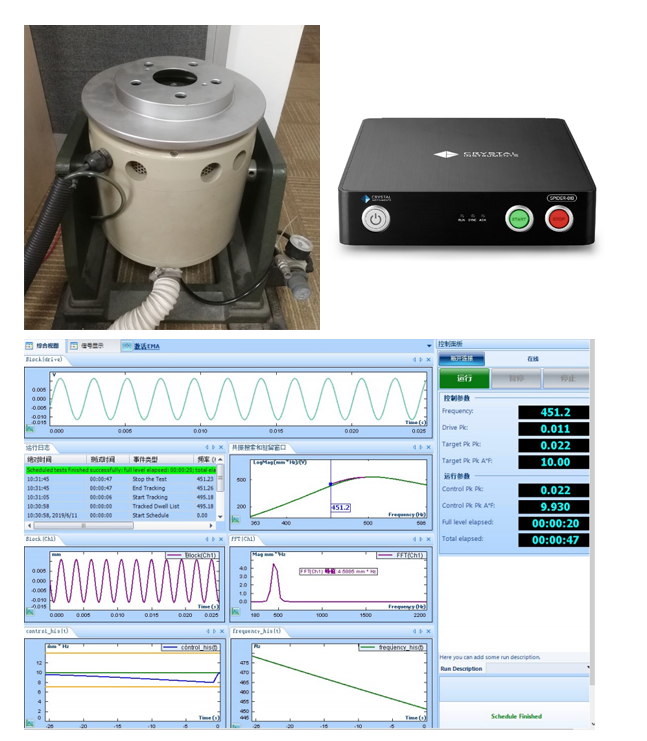 圖四?現場實驗示意圖
圖四?現場實驗示意圖
根據剎車盤的規格制定一個工裝安裝在振動臺上。測試時將剎車盤放置在振動臺上。兩個IEPE型加速度傳感器,一個吸附在剎車盤上用于監測,另一個吸附在振動臺上用于控制。通過BNC接口連接到Spider-81B上(Spider內置IEPE調理,無需供電)。
使用EDM VCS軟件正弦掃頻功能,從低頻到高頻掃頻一遍后,查看ASP譜和頻響函數峰值,并記錄生成報告。測量結束。
該方案屬于通過工裝安裝試件,人為操作少,測試效果一致性高,效率高,需要振動臺激勵。測試時只需要將剎車盤放到振動臺上,通過掃頻振動確定共振頻率。缺點設備價格成本相對高。
The post 機械零部件剎車盤振動測試固有頻率解決方案 appeared first on 杭州銳達數字技術有限公司.
]]>The post Spider-80X VCS正弦掃頻的濾波控制功能 appeared first on 杭州銳達數字技術有限公司.
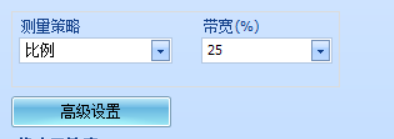
]]>在正弦掃頻過程中,測量策略決定了正弦波如何被系統測量。用戶可以選擇比例、固定、均方根、平均和峰值的方式進行測量。
理想狀態下,正弦信號不會失真,不同的測量策略都會得到相同的結果。當信號存在失真的情況下,依據測量策略的不同,控制器就會輸出不同的幅值。
二、測量策略的種類
比例濾波:計算只考慮基頻部分,測量頻帶范圍外的信號和能量會被忽略。濾波器的頻帶范圍根據掃頻的頻率比例變化。
固定濾波:計算只考慮基頻部分,測量頻帶范圍外的信號和能量會被忽略。濾波器的頻帶范圍由用戶定義。
均方根濾波:控制器在不濾波的情況下,獲取時域信號并計算RMS。RMS值會與一個因子相乘以估計正弦波的峰值。
平均濾波:控制器在不濾波的情況下,獲取時域信號并計算幅值絕對值的平均值。平均值會與一個因子相乘以估計正弦波的峰值。
峰值濾波:控制器在不濾波的情況下,獲取時域信號并在一定時間內探知峰值。該峰值被認為是正弦波的峰值。
當跟蹤濾波打開時,只測量基頻的能量,所以測量值不容易受到噪音干擾。但是跟蹤濾波啟動時,測量值傾向于較低的值,所以測試模塊的測量結果會偏高。
均方根濾波、平均濾波和峰值濾波不使用跟蹤濾波器,所以噪聲對測量品質有很大的影響。使用峰值濾波時,峰值在時域波形上處于較高的值,測試模塊的測量結果會偏低。
除非測試參數明確,測量策略清晰,我們推薦用戶使用比例濾波。
三、EDM中的操作方式
在右側控制面板上選擇 配置,進入測試參數選項。
找到測量策略進行選擇。
The post Spider-80X VCS正弦掃頻的濾波控制功能 appeared first on 杭州銳達數字技術有限公司.
]]>The post 晶鉆儀器振動控制器的振動測試視頻介紹 appeared first on 杭州銳達數字技術有限公司.
]]>振動測試是必不可少的,對于防止災難性的設計錯誤像汽車,航空航天,電子,軍工等行業。美國晶鉆儀器提供精密和準確的振動控制器進行常規測試,如隨機測試、正弦掃頻測試、振動測試和路譜仿真。第四代振動控制器是以網絡為基礎的,它具有高擴展性及高通道操作的能力。
有關控制器的信息,請訪問:
http://www.crystalinstruments.com/vibration-test-controllers/
http://www.cn-hua.com/vibration-test-controllers(中文)
有關振動臺的信息,請訪問
http://www.sentekdynamics.com/turn-key-vibration-test-equipment/
The post 晶鉆儀器振動控制器的振動測試視頻介紹 appeared first on 杭州銳達數字技術有限公司.
]]>The post CoCo80/90動態信號分析儀的正弦掃頻分析 (編號: CoCo-P13) appeared first on 杭州銳達數字技術有限公司.
]]>CoCo-80或CoCo-90動態信號分析儀它的輸出控制有三種形式:
- 固定輸出幅值:輸出電壓是固定的;
- 開環預定模式(profile)輸出:輸出信號的頻譜要求符合預定義的頻譜形狀,無反饋控制。
- 閉環預定模式(profile)輸出:以某個輸入通道的信號為反饋,精確調整輸出信號,使其與預定義的頻譜形狀精確吻合。
The post CoCo80/90動態信號分析儀的正弦掃頻分析 (編號: CoCo-P13) appeared first on 杭州銳達數字技術有限公司.
]]>The post Spider81/Spider80X掃頻正弦振動控制功能選項 appeared first on 杭州銳達數字技術有限公司.
]]>
共振搜索與跟蹤駐留(RSD) (VCS-40-01)
搜索功能先通過傳遞函數來確定共振頻率,然后在實時控制過程中,跟蹤駐留測試規程將跟蹤測試每一個共振頻率.
共振頻率搜索:在一定的范圍內依據Q值或傳遞函數幅值自動搜索共振峰.
跟蹤駐留規程:共振頻率可手動輸入或從搜索表項中導入。駐留測試一直延續到時間周期到、共振頻率超限,或幅值超限.
正弦多點控制 (VCS-40-02)
允許設置多個通道為控制通道.
多點控制策略: RMS加權平均或幅值加權平均
正弦與RSD高頻率范圍擴展(VCS-40-03)
擴展控制頻率范圍至4 kHz,最高到46 kHz. 根據不同設置可能要減少最高通道數及提高重疊率.
正弦THD計算(VCS-40-05)
該選項功能可計算控制信號的諧波失真度 (THD).
正弦與RSD測試時的長時間波形記錄(VCS-40-06)
正弦和RSD測試過程中記錄所有通道的波形數據.數據可以存儲在Spider或電腦上. 可以使用壓縮技術以減少存儲量.
典型的連續記錄時間:4通道~4 hours,頻率范圍2,000Hz,4 GB閃存
Sine 驅動限值(VCS-40-07)
限值可應用于控制或監測通道.,允許的限值類型為陷波(notching)限值和終止限值.限值表可以通過斷點的幅值和頻率進行設置,也可以從已保存的頻譜中導入。最大允許的峰值加速度、速度、位移可以被計算出來.
步進正弦控制(VCS-40-08)
步進正弦通過在一定頻率范圍內使用一系列短駐留來實現.,其步長可按對數或線性比例來劃分.
運行流程中的步進正弦規程:用戶可定義頻率范圍、步長分辨率、以及每個頻率的駐留時間或周期
Sine與RSD測試的低頻擴展(VCS-40-09)
可擴展頻率范圍下限從2Hz~0.1Hz.
The post Spider81/Spider80X掃頻正弦振動控制功能選項 appeared first on 杭州銳達數字技術有限公司.
]]>The post 正弦掃頻的兩種激勵方式 appeared first on 杭州銳達數字技術有限公司.
]]>The post 正弦掃頻的兩種激勵方式 appeared first on 杭州銳達數字技術有限公司.
]]>The post 什么是基礎掃頻正弦控制? appeared first on 杭州銳達數字技術有限公司.
]]>Spider-81掃頻正弦振動控制系統可提供精確、實時的多通道控制和分析功能。最高可支持64通道的限值監測與數據采集。記錄選項可支持全部輸入通道以最高采樣率實時記錄時間流數據,而不受總通道數增加的限制。獨特的硬件設計使得回路響應時間小于10ms。黑匣子模式允許用戶脫離PC機運行。內置備用電池可以在掉電時進行保護,內置時鐘用于時間標志及網絡中斷時的容錯。VCS-40-00是掃頻正弦試用模式.
The post 什么是基礎掃頻正弦控制? appeared first on 杭州銳達數字技術有限公司.
]]>The post 正弦掃頻和共振搜索和駐留的關系 appeared first on 杭州銳達數字技術有限公司.
]]>The post 正弦掃頻和共振搜索和駐留的關系 appeared first on 杭州銳達數字技術有限公司.
]]>The post CoCo的正弦掃頻范圍和分布情況 appeared first on 杭州銳達數字技術有限公司.
]]>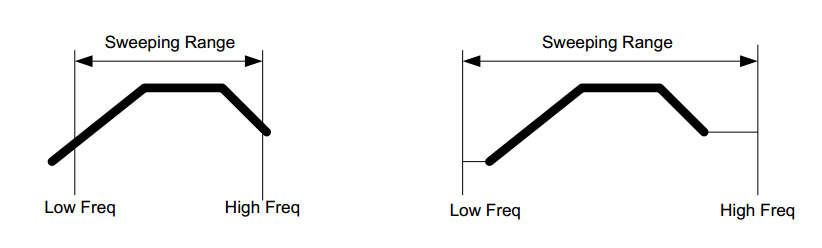
圖 12. 掃頻范圍和分布
圖 12 中,粗線表示分布。如果低頻或高頻界限同分布情況不匹配,軟件會向左或向右擴大邊界,這樣在輸出掃頻時總會存在有效分布值點。
Sweeps(掃頻)控制掃頻正弦輸出。掃頻是指輸出信號會生成從低頻到高頻或從高頻到低頻的正弦頻率。此外,用戶可以使用以下操作手動控制掃頻:
- 開始輸出
- 停止輸出:該操作將中止測試
- 相反方向
- 跳躍至頻率
- 保持掃頻:該操作不會使輸出電壓振幅下降,頻率固定。
- 重新開始掃頻
- 清除顯示歷史

圖 13. 掃頻控制選項
為了避免沖擊 UUT,正弦輸出絕不會突然開始或停止,相反,正弦波會緩慢的從零上升到用戶需要的級別。上升斜率定義為 dB/sec。40dB/sec 是指正弦波的量值以每秒 100 倍的速度上升或下降。這是一個用戶定義的優先值。
The post CoCo的正弦掃頻范圍和分布情況 appeared first on 杭州銳達數字技術有限公司.
]]>The post CoCo的三種輸出控制模式 appeared first on 杭州銳達數字技術有限公司.
]]>我們已經討論了如何通過掃頻模式、掃頻范圍以及掃頻速度來改變和控制頻率。本章節將討論如何控制輸出振幅A(t)。
CoCo 提供 3 種輸出模式:
- 恒定輸出級別
- 輸出級別分布
- 帶自動增益控制的輸入配置
恒定輸出級別
![]() 恒定輸出級別是生成輸出的最簡單方式,恒定輸出級別通常定義為 0~peakV。例如,1Vpk 是指輸出掃頻正弦為 0~peak 1V。
恒定輸出級別是生成輸出的最簡單方式,恒定輸出級別通常定義為 0~peakV。例如,1Vpk 是指輸出掃頻正弦為 0~peak 1V。
使用恒定輸出級別,響應可顯示峰值或谷值。
一個單自由度(SDOF)儀器應用恒定輸出級別如下圖所示。使用機械激發系統,CoCo-80 電壓輸出可以轉換為力。這樣,通過位移、速度或加速度測量得到的響應可以顯示為一個共鳴峰。
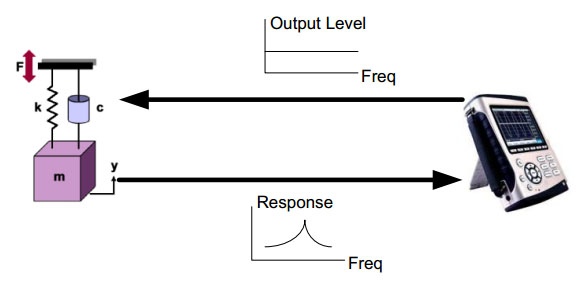
使用恒定級別模式的缺點——有時系統動態范圍變化極端,響應信號可能超出輸入范圍。這種現象對于輕阻尼系統來說很常見。例如,一個動態范圍為 60dB 的 UUT,測試中顯示的響應值常常會變化 1000 倍。
輸出級別分布
通過輸出級別分布,用戶可自定義輸出級別。為了克服響應變化范圍過大的問題,可以將激發信號減小到特定頻率范圍。上例中,由于用戶可能知道共鳴頻率的大小,我們可以將輸出設置為特定掃頻頻率范圍中的較低級別。這種以頻率控制輸出級別的控制方式叫做輸出級別分布。

圖 9. 輸出級別分布
圖 9 顯示了用戶在輸出級別分布中故意制造的一個缺口,這樣響應信號就減小到了共鳴區域。
以頻率控制輸出信號能夠幫助改進 FRF 或轉換率測量,比恒定級別輸出方式要好。這種方式的缺點是用戶必須在測試前了解 UUT 的動態范圍。此外,輸出級別分布無法同 UUT 動態特征精確匹配。為了克服這個問題,CoCo 同時配備了帶自動增益控制的閉環控制方式。
自動增益控制
使用自動增益,根據目標輸入和閉環增益實時計算A(f,t),這種先進的方法如圖 10 所示。

圖 10. 自動增益控制模式
首先,用戶必須為一個(輸入 CoCo 的)響應通道設定目標分布,它的形狀(輸入分布)無需是一條直線。接下來的掃頻過程中,CoCo 會測量響應和輸出之間的轉換函數。CoCo 會自動參考該轉換函數調整輸出,使測量輸入信號量值匹配輸入控制分布。由于轉換函數隨頻率改變,這種方法需要一個閉環控制對數。
自動增益輸入分布是激發系統最有效的方法,可以將輸入通道的動態范圍最大化。然而用戶也必須注意,該方法在輸出通道過大時會減弱輸入通道,在輸入通道過小時輸入通道會減小為背景噪聲級。
必須注意到的是,輸出和輸入分布的工程單位不同。通常正弦波輸出的工程單位是 Vpk。輸入單位由該通道測量單位確定。例如,若果響應傳感器是位移傳感器,則輸入分布的單位就是位移單位,0~Peak;如果是加速計,則單位是加速度單位,0~Peak。
選擇輸入分布控制,通道 2 為默認控制通道,用戶也可選擇參考通道(通道 1)之外的任意通道作為控制通道。
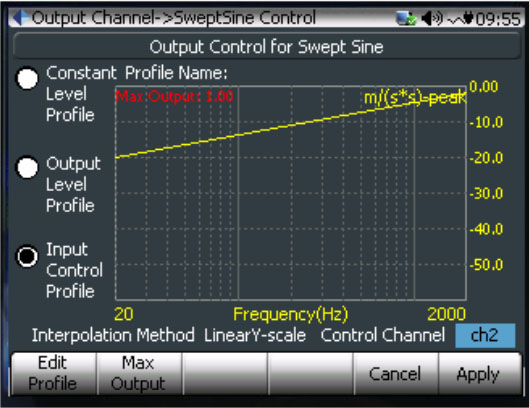
圖 11. 輸入自動增益控制模式分布
The post CoCo的三種輸出控制模式 appeared first on 杭州銳達數字技術有限公司.
]]>